Waymo Patents a Two-Stage AI Model for Predicting Hidden Pedestrians
A parked bus blocks your view of the crosswalk ahead — and a child might be about to step out. Waymo's latest patent describes an AI system trained specifically to assign probabilities to where hidden pedestrians and other moving objects might be, before the car's sensors can ever see them.
How Waymo's self-driving car guesses where hidden people are
Imagine you're driving and a large delivery truck is parked at the corner, completely hiding the sidewalk beyond it. You slow down because someone might be about to step out — you just can't see them yet. Waymo's autonomous vehicles need to make the same judgment call, thousands of times per trip.
This patent describes a system that teaches a self-driving car to build a kind of "suspicion map" of its surroundings — a probability heatmap showing where hidden pedestrians, cyclists, or other moving objects are most likely to be lurking behind obstacles, even when the car's lidar and cameras can't directly detect them.
The trick is a two-stage AI training process. First, one model learns to find objects that have been deliberately hidden in training data. Then a second model uses that knowledge to generate real-time probability maps of occluded areas on actual roads. The result gets deployed directly onto Waymo's autonomous vehicles.
How the two-model training pipeline spots occluded objects
The patent describes a two-stage machine learning pipeline designed to handle one of autonomous driving's trickiest challenges: reacting to things you literally cannot see.
Stage one involves training a first model on real perception data — lidar scans, camera feeds, radar returns — from recorded driving scenes. In those scenes, target objects (pedestrians, cyclists, etc.) are artificially hidden using a masking transformation (think of it like digitally erasing an object from training data so the model has to infer its location from context clues like shadows, partial shapes, or crowd flow).
Stage two takes the output of that first model and uses it to train a second model. This second model's job is to produce a probability map — essentially a grid overlaid on the driving scene where each cell gets a score representing how likely it is that a hidden animate object occupies that space. Occluded regions behind parked cars, building corners, or dense foliage get scored based on learned patterns.
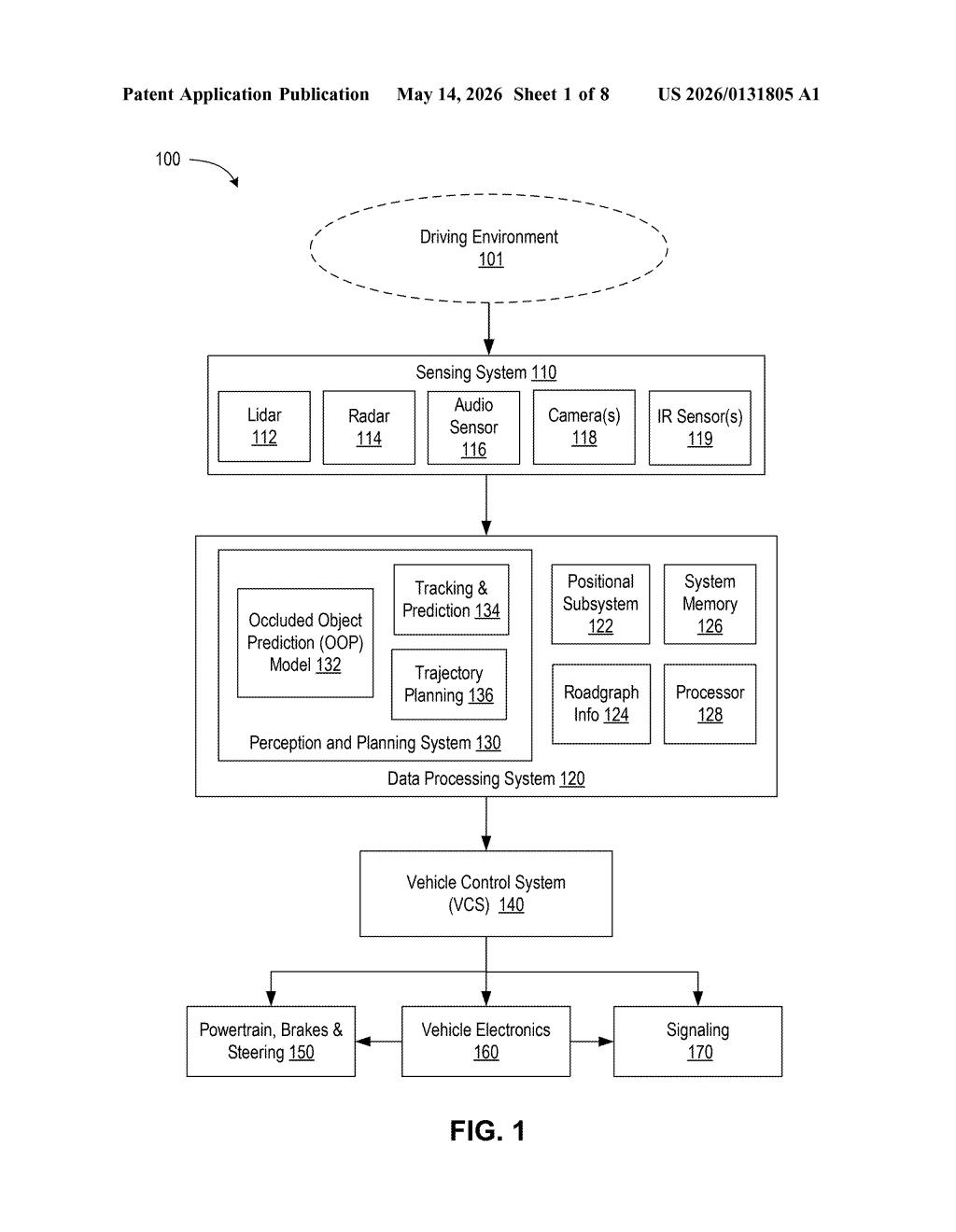
The second model is then deployed on the vehicle itself, where it runs in real time alongside the car's
- Lidar and radar tracking subsystem
- Camera-based perception pipeline
- Trajectory planning module
The output feeds directly into how the vehicle plans its path and speed around blind spots.
Why predicting invisible pedestrians is a hard unsolved problem
Most AV perception systems are reactive — they respond to what sensors detect. Waymo's approach here is predictive: the car reasons about what it can't see, not just what it can. That matters enormously at urban intersections, school zones, and anywhere pedestrian traffic is dense and unpredictable. If the vehicle can assign even a rough probability to "someone is probably behind that bus," it can slow preemptively rather than waiting for a sensor hit.
For you as a pedestrian or nearby driver, this is the kind of behind-the-scenes infrastructure that makes the difference between an AV that feels cautious-but-confident and one that feels dangerously oblivious. It's also a direct answer to one of the loudest criticisms of self-driving systems: that they struggle with things outside their sensor field of view.
This is genuinely important work, not a flashy demo feature. Occluded object prediction is one of the core unsolved problems in AV safety, and Waymo's two-stage masked-training approach is a clever way to generate supervised training signal for something that's inherently unobservable. The fact that this is coming out of Waymo — which already operates commercial robotaxis — means this research has a real shot at influencing actual vehicle behavior, not just benchmark papers.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.