Nvidia Patents a System for Teaching Robots to Pick Objects Out of a Bin
Getting a robot to reach into a messy bin and pull out the right item — without knocking everything else over — is one of the harder problems in robotics. Nvidia just filed a patent for a system designed to do exactly that.
What Nvidia's robot bin-picking vision system actually does
Imagine a warehouse robot staring into a tote full of jumbled products. It needs to grab one item without a human pointing at it. That's the problem this patent is trying to solve.
Nvidia's system gives the robot a way to look at a camera image of the bin, draw an outline around each object it can see, and then score those outlines to decide which object is the best candidate to grab. Once it picks a winner, it figures out exactly where that object is sitting — which direction it's facing, how it's tilted — and uses that information to plan the arm's movement.
The result is a robot that can see, decide, and act in a bin full of clutter — without needing every item neatly arranged on a conveyor belt. That kind of flexibility is exactly what makes real-world warehouse and factory automation so difficult to pull off.
How the system spots, scores, and grabs the right object
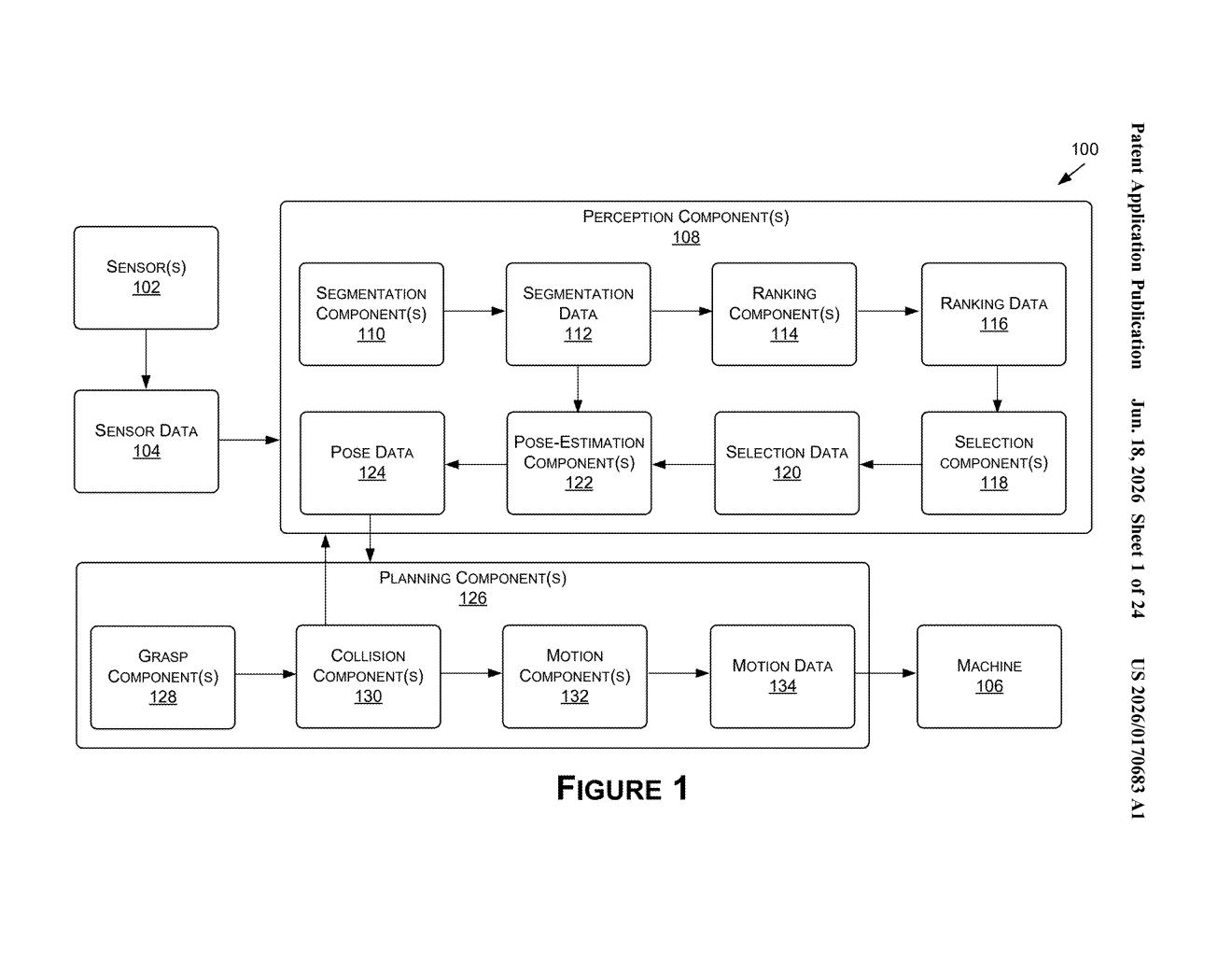
The patent describes a perception-and-planning pipeline — a sequence of steps that takes raw camera images and converts them into physical robot movements.
- Segmentation: The system processes camera images and draws pixel-level outlines (called segmentation masks) around each visible object in the bin. Think of it like a highlighter tracing each item's shape.
- Scoring and selection: Each mask gets a score, and the system selects the highest-scoring object — likely the one most visible, most graspable, or least tangled with its neighbors.
- Pose estimation: The system then determines the selected object's pose — its precise 3D position and orientation (which way is it facing, is it tilted, is it upside-down?).
- Motion planning: Using that pose, the system calculates a motion path — a trajectory for the robot arm to follow so it can safely reach in, grip the object, and pull it out without disturbing the rest.
The system is specifically designed for objects inside containers or partially enclosed spaces, where walls, clutter, and overlapping items make simple top-down grabbing unreliable.
What this means for warehouse robots and factory automation
Bin-picking — the deceptively simple task of grabbing an item from a pile — has been called one of the last great unsolved problems in industrial robotics. Most current systems require items to be pre-sorted or presented one at a time. A reliable vision-and-planning pipeline that works in real bin conditions would unlock much faster and cheaper warehouse automation for companies like Amazon, UPS, or any manufacturer handling mixed-SKU inventory.
For Nvidia, this fits squarely into its push into physical AI and robotics — the idea that the same kind of perception models powering self-driving cars can also run inside factory arms. If this system works at scale, it could become a component of Nvidia's Isaac robotics platform, which already targets industrial automation.
This is a real engineering problem with a real commercial payoff — bin-picking is genuinely hard, and any working solution has immediate customers in logistics and manufacturing. The patent itself covers the pipeline architecture rather than a single novel trick, which suggests Nvidia is staking out broad territory in robot perception rather than claiming one narrow technique.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.