Qualcomm Patents a Way to Spot Dirty or Failing Cameras in Self-Driving Cars
What if a self-driving car could notice that one of its cameras was covered in mud — before it made a bad decision because of it? That's the core idea behind this Qualcomm patent.
What Qualcomm's camera self-check system actually does
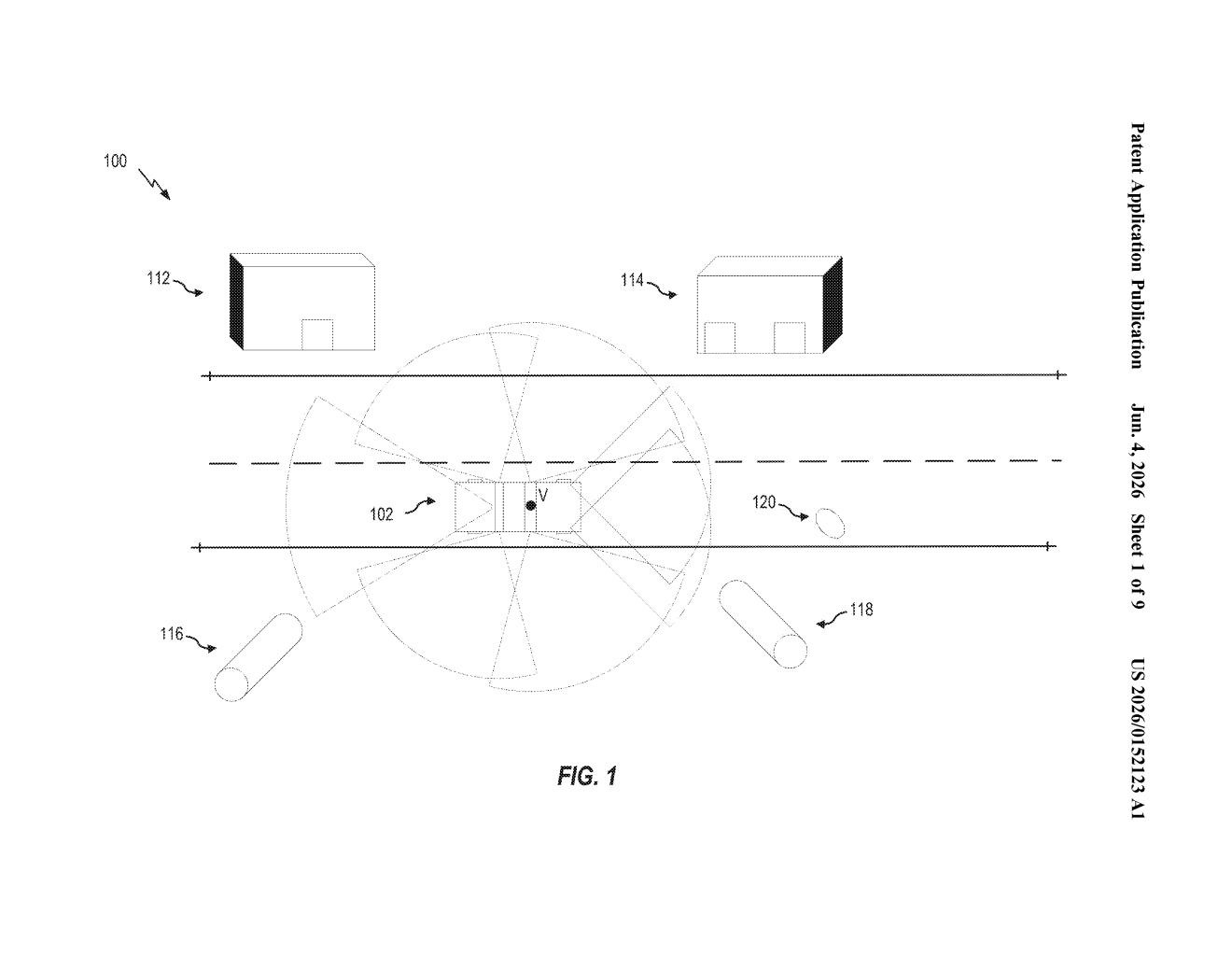
Imagine you're in a self-driving car, and a splatter of mud lands on one of its cameras. The car's software is still getting an image, but it's partially obscured. Without a built-in way to detect that, the car might just keep driving as if nothing is wrong — which is a problem.
Qualcomm's patent describes a system that catches exactly that kind of sensor degradation. It works by comparing what the camera currently sees with what it should be seeing, based on a top-down map of the environment the car has already built up. If those two pictures don't match where they should, the system flags the inconsistent region as potentially degraded.
The key insight is using that overhead "bird's-eye view" as a source of truth. By projecting features from the top-down map back down onto the camera's viewpoint, the system can pinpoint which part of the image looks wrong — a mud smear, lens fog, or physical damage — rather than just knowing something is off.
How the BEV-to-image projection detects degraded regions
The patent describes a pipeline that cross-references a camera image against a pre-built Bird's Eye View (BEV) representation — essentially a top-down encoded map of the surrounding environment — to find regions in the camera feed that look degraded.
Here's the step-by-step flow:
- Build the BEV: Sensor data is aggregated into a top-down feature map that encodes what the environment looks like across multiple perspectives and moments in time.
- Inverse View Transform: The system reprojects features from the BEV back into the front-facing camera's coordinate space (the "image plane"). Think of it like taking the overhead map and folding it into what a street-level camera should be seeing.
- Feature Fusion: The reprojected BEV features are merged with the features extracted directly from the live camera image, creating a unified representation.
- Degradation Detection: Any region where the expected BEV-derived features diverge significantly from the live image features is flagged as a region of degradation — potentially a dirty lens, physical occlusion, or hardware failure.
The approach is notable because it doesn't require a clean reference image stored ahead of time. The BEV map acts as a continuously updated, multi-sensor consensus view, making the detection more robust in dynamic real-world conditions.
What this means for autonomous vehicle sensor reliability
For autonomous vehicles and advanced driver-assistance systems (ADAS), a degraded camera isn't just an inconvenience — it's a safety issue. Current systems often rely on simple statistical checks (is the image too blurry? too dark?) rather than understanding what should be visible in a specific region. Qualcomm's approach is semantically aware: it knows what the camera ought to see and can isolate exactly where the problem is.
This also matters for sensor fusion architectures more broadly. As vehicles rely on combinations of cameras, LiDAR, and radar feeding into shared BEV representations, a method that uses that shared map to audit individual sensors becomes a natural fit for next-generation autonomy stacks. Qualcomm's Snapdragon Ride platform already targets this market, so this patent lines up directly with their automotive ambitions.
This is solid, practically useful work — not flashy AI research, but exactly the kind of safety-critical infrastructure that autonomous vehicle programs need to get right before scaling. Using the BEV map as a sensor-health oracle is an elegant reuse of a representation you're already computing. Worth watching as ADAS regulation tightens globally.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.