Zoox Patents a Dual-Mode Path Planning System for Self-Driving Cars
Self-driving cars have to plan paths in two very different ways depending on what they're doing — and Zoox is patenting a system that switches between those modes on the fly.
What Zoox's dual-mode trajectory switching actually does
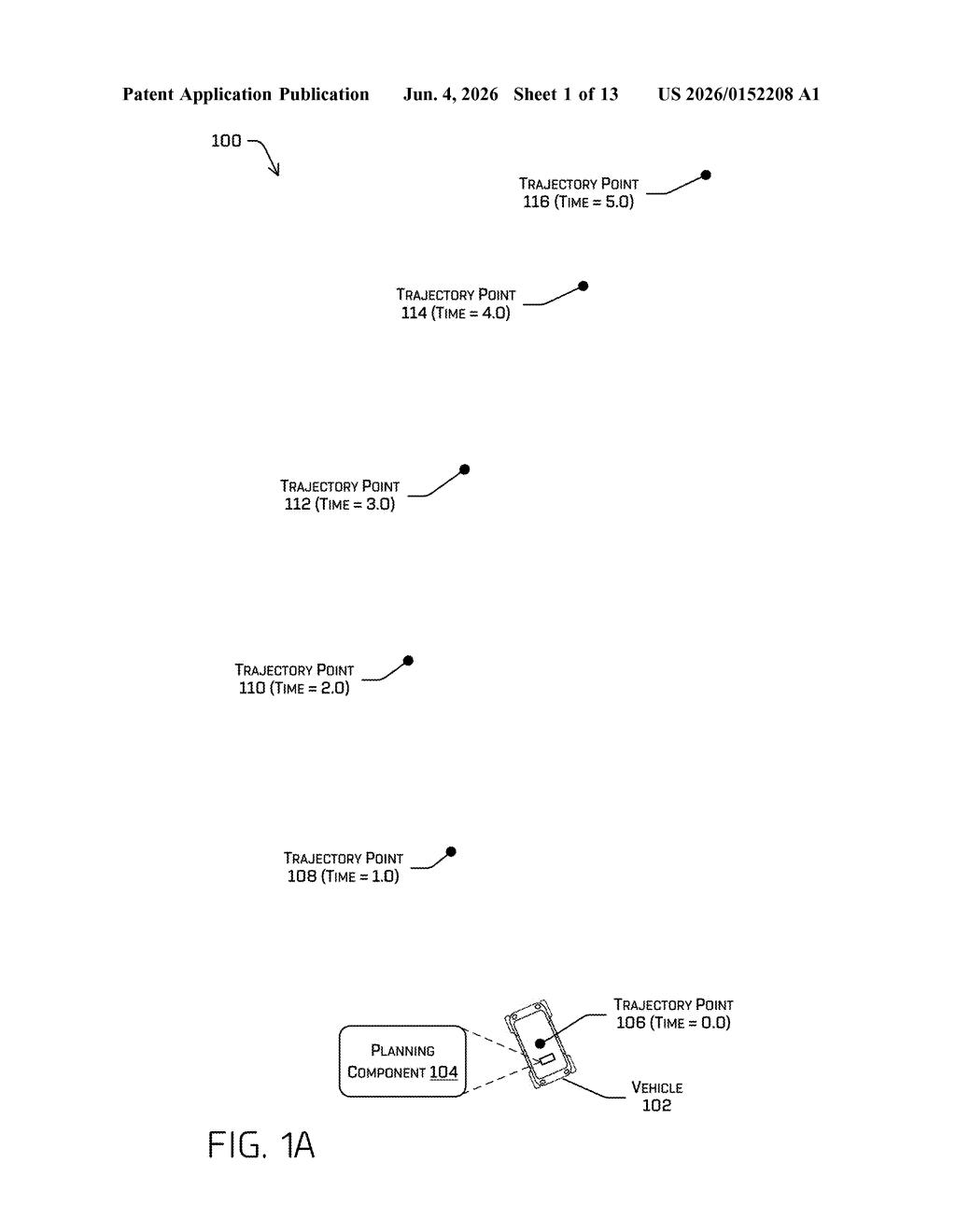
Imagine a self-driving car cruising down a highway at a steady speed. In that case, it's useful to plan its route around time — knowing exactly where the car will be every half-second. But when the same car approaches a complex intersection or has to pull over, fixed time intervals get messy. Instead, it's easier to plan by distance — mapping out every few feet regardless of how fast the car is moving.
Zoox's patent describes a system that can do both, and — critically — switch between them depending on what's happening. If the car detects a specific event (like a stop request or an unexpected obstacle), it transitions from one planning style to the other, mid-drive, without losing consistency between cycles.
The system also applies constraints to stop the car from attempting maneuvers it can't physically execute, and uses math-based cost functions to continuously refine the path. It's essentially a trajectory planning brain that knows when to switch gears.
How Zoox switches between time-based and distance-based paths
At the core of this patent are two trajectory types that the autonomous vehicle can generate and follow:
- Temporal trajectories — the vehicle's future positions are sampled at fixed time intervals (e.g., every 100ms). Great for highway or predictable driving where speed is relatively constant.
- Spatial trajectories — positions are sampled at fixed distance intervals (e.g., every meter). Better for slow, complex maneuvers like parking, pulling to a curb, or navigating tight intersections.
The key invention is the dynamic switching between these two modes. When the planning component detects a triggering event — say, the vehicle needs to transition from an on-route cruise to an off-route stop — it determines which trajectory type is now appropriate and hands off control to that new plan.
To maintain temporal consistency (meaning the new plan doesn't contradict the old one in a jarring way), the system resamples the previous trajectory before switching. Think of it like a GPS that doesn't just reroute you — it smoothly interpolates from your current position into the new path so you don't feel a sudden jerk in the instructions.
Constraint enforcement is also baked in: the optimizer actively prevents the system from generating paths that require maneuvers the vehicle's physical hardware can't perform — things like turns too sharp for its steering geometry.
What this means for smoother, safer AV route planning
Most autonomous vehicle systems are optimized for either structured highway driving or complex urban maneuvering — not both in the same planning loop. Zoox's approach of maintaining two trajectory modes and switching between them addresses a real gap: the messy middle moments when an AV transitions from one driving context to another. That's often where edge cases and accidents happen.
Zoox operates a robotaxi service in Las Vegas and is majority-owned by Amazon, so this isn't purely theoretical research. A more robust trajectory system directly affects ride safety, passenger comfort, and the vehicle's ability to handle real-world unpredictability — like a passenger requesting a last-minute drop-off location change mid-route.
This is solid, unsexy engineering work — the kind that doesn't make headlines but absolutely matters for whether a robotaxi feels safe or lurchy. The dual-mode switching with resampling for temporal consistency is a genuine technical contribution, not just a patent-for-the-sake-of-it filing. If Zoox scales its service, this is exactly the kind of infrastructure patent that earns its keep.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.