Zoox Patents a Backup Brain That Keeps Its Robotaxis Moving After a Computer Crash
When one of the computers inside a Zoox robotaxi fails mid-ride, the vehicle can't just pull over and wait for a tow truck. This patent describes the system Zoox is building to make sure a crash in software doesn't become a crisis on the road.
What Zoox's crash-recovery system actually does
Imagine you're in a self-driving car and one of its onboard computers freezes. The car doesn't know exactly where it is anymore, and without that information it can't safely plan its next move. That's the problem Zoox is solving here.
The patent describes a three-computer setup. One computer plans the route, one handles the moment-to-moment driving, and a third sits in the background as a backup. If the main driving computer fails, the backup takes over and keeps the car moving safely. It also keeps track of the car's position and movement the whole time.
The clever part: when the main driving computer finishes rebooting, it doesn't start from scratch. It reads the backup's position data as a starting point and picks up right where it left off, so the car can smoothly return to full operation without a jarring handoff.
How the backup computer hands control back to the primary
The patent centers on what Zoox calls pose information, which is the vehicle's real-time understanding of its own position, orientation, and movement. Without accurate pose data, an autonomous driving system can't safely plan or execute a path.
Zoox's architecture splits this work across three separate computer systems:
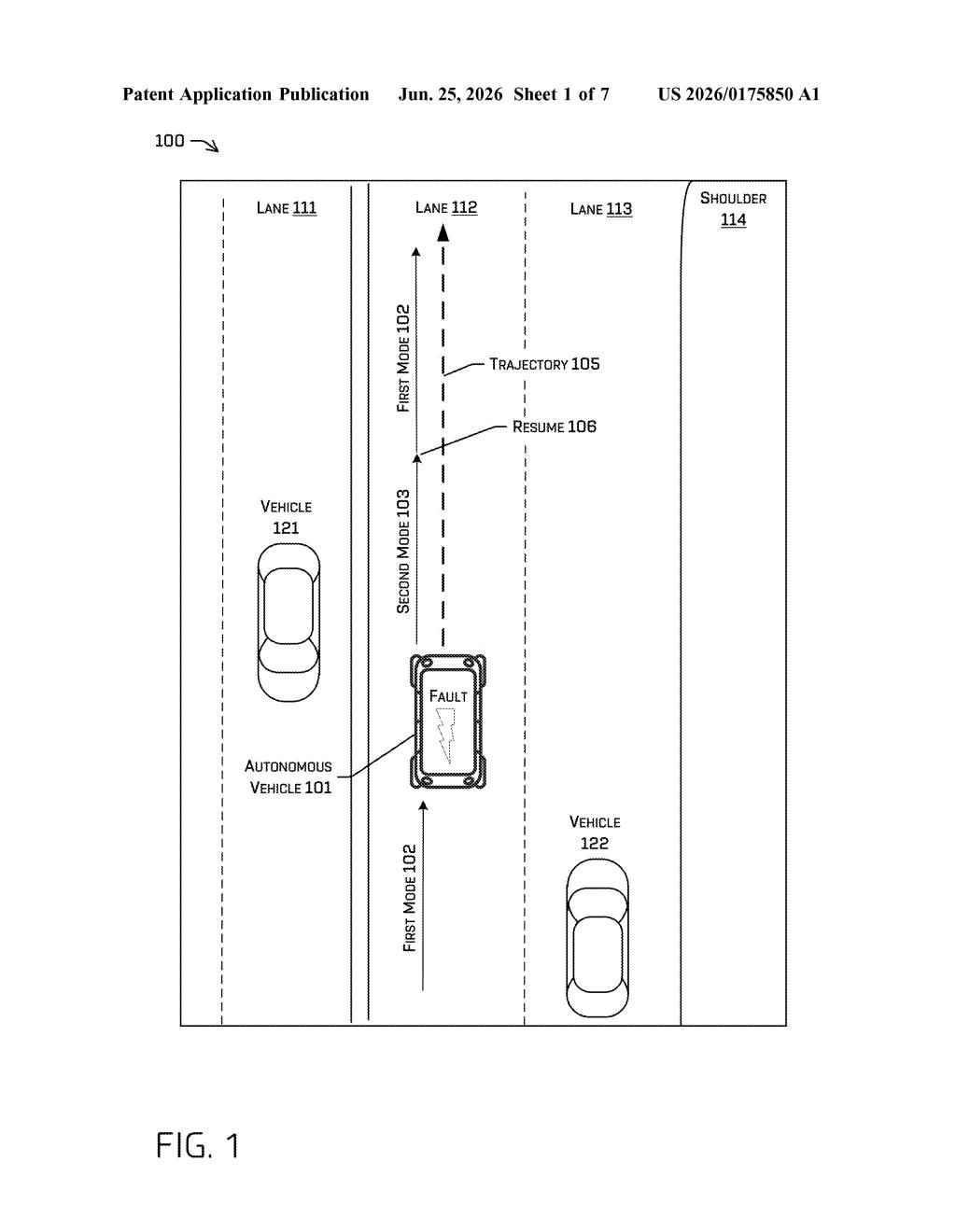
- A Primary Compute Node (PCN) that generates driving trajectories (the planned path forward)
- An Active Motion Compute Node (MCN) that translates those trajectories into actual vehicle control and continuously publishes pose information back to the PCN
- A Backup MCN that runs in parallel and maintains its own independent stream of pose information
In normal operation, the Active MCN does the heavy lifting. If it faults, the vehicle enters a safe mode where the Backup MCN takes over vehicle control and starts publishing its own pose data to the PCN.
The recovery process is where the patent gets specific. Rather than forcing the Active MCN to rebuild its position estimate from zero after rebooting, the system feeds it a snapshot of the Backup MCN's pose data as a starting point. This lets the Active MCN reconstruct its own pose stream quickly and hand control back to the primary system without the kind of discontinuity that could confuse the trajectory planner.
What this means for robotaxi safety and reliability
Autonomous vehicles depend on a continuous, unbroken stream of self-location data. A gap in that data, even a short one during a reboot, could cause the planning system to make unsafe decisions because it's working from stale or mismatched information. Zoox's approach treats pose continuity as a first-class problem rather than an afterthought.
For passengers, this is the infrastructure that makes a robotaxi feel trustworthy rather than fragile. The goal is that you never know a computer hiccup happened at all. Zoox is an Amazon subsidiary currently operating a unique bidirectional vehicle in Las Vegas, and fault-tolerance work like this is a core part of what regulators and the public will need to see before wider deployment.
This is unglamorous but genuinely important engineering. Fault recovery in safety-critical systems is one of those areas where getting it wrong has real consequences, and Zoox is being unusually specific about the handoff mechanism. It's not a flashy AI patent, but it's exactly the kind of thing that separates a robotaxi company with a real deployment path from one that's still mostly demo videos.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.