Qualcomm Patents a Mapping System That Pools Visual Data Across Multiple Vehicles
Instead of each car building its own map from scratch, Qualcomm's patent describes a system where vehicles pool their visual observations through a central server — and every car benefits from what every other car has seen.
How Qualcomm's crowd-sourced vehicle maps actually work
Imagine two different drivers passing the same intersection on the same day. Each car's cameras capture the same stop sign, the same storefront, the same lane markings — but neither car knows the other exists. Today, that shared knowledge mostly goes to waste.
Qualcomm's patent describes a server-based system that collects compressed visual feature data from many vehicles, figures out when two cars have seen the same object, and assembles a richer shared map that gets sent back to vehicles. Your car doesn't need to have seen something itself — it can localize using landmarks that another car catalogued.
The practical upshot is that a vehicle driving a route for the first time could still have detailed, up-to-date map data, built from the collective experience of every other vehicle that drove it before. It's crowd-sourcing, but for the physical world your car navigates.
How the server matches features across different vehicles' cameras
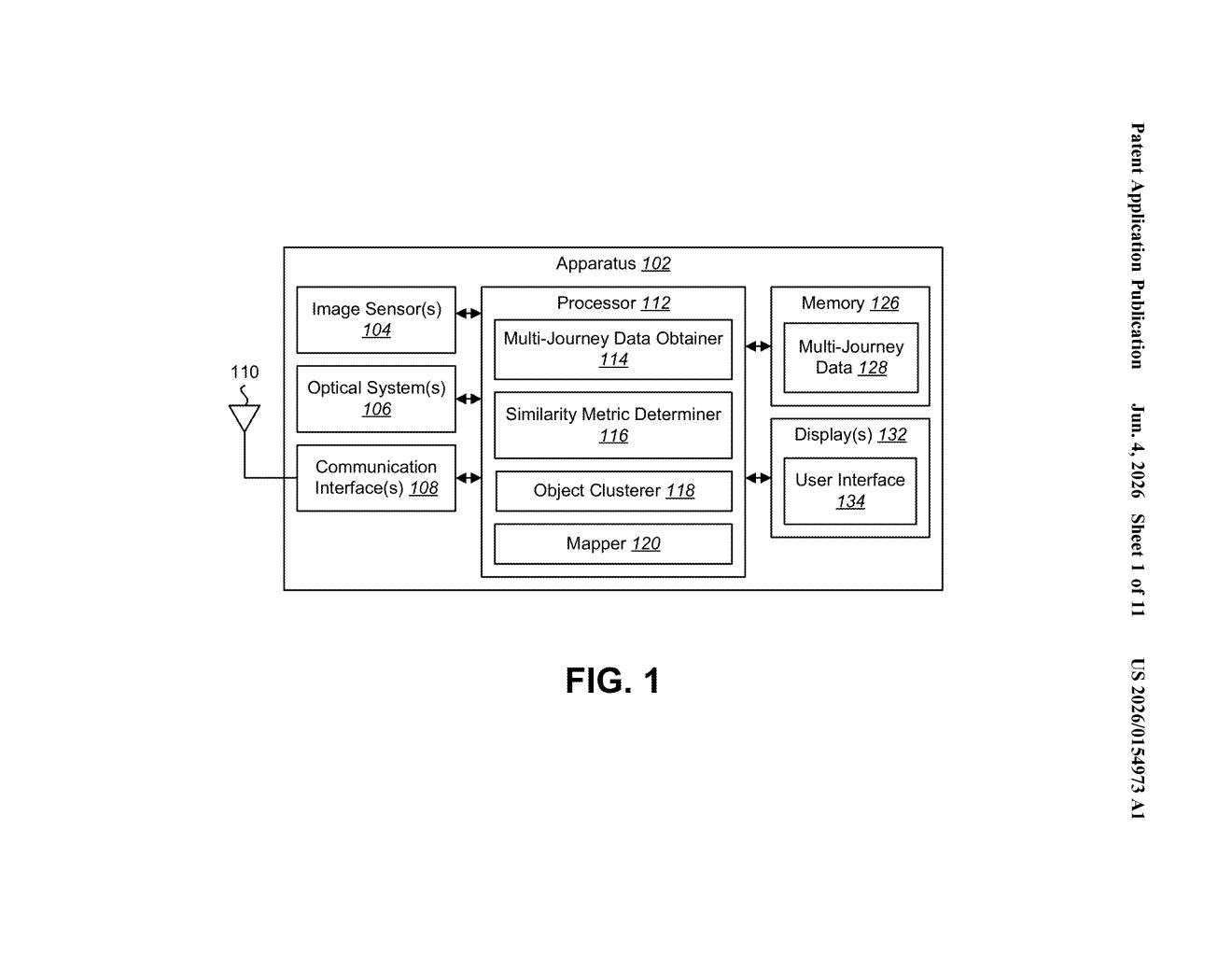
The system has two main pieces: an on-vehicle pipeline and a central server.
On the vehicle side, the car's sensors capture the environment and the processor extracts feature data — compact mathematical descriptors of objects in the scene (think: edge patterns, corner signatures, or learned neural embeddings that represent a landmark without sending the full image). These compressed descriptors get transmitted to the server rather than raw video, which keeps bandwidth manageable.
On the server side, the key step is computing a similarity metric — essentially a score that answers 'did Vehicle A and Vehicle B see the same physical object?' When two vehicles' feature vectors are similar enough, the server knows they're describing the same real-world landmark, and can fuse those observations into a single coherent map entry.
- Vehicle 1 sees a building corner from the north; Vehicle 2 sees it from the west
- The server matches the two feature sets using the similarity metric
- A combined map entry — with better geometry than either alone — is created and pushed back to subscribing vehicles
The vehicle then localizes itself (figures out precisely where it is) by comparing its live sensor data against the stored map. This is standard visual localization (matching current camera frames to a known map), but the map itself is now crowd-sourced and continuously updated.
What this means for autonomous vehicle mapping at scale
For autonomous and semi-autonomous vehicles, accurate localization is everything — GPS alone isn't precise enough for lane-level navigation, especially in urban canyons or tunnels. Building high-definition maps traditionally requires expensive dedicated mapping fleets. Qualcomm's approach flips that model: every production vehicle becomes a mapping contributor, and the server continuously merges those contributions into a living map.
Qualcomm is a major supplier of automotive-grade compute platforms (Snapdragon Ride), so this patent sits squarely in their existing business. If this system ships, your car's map could be hours or minutes old rather than months old — which matters a lot when a road changes, a construction zone appears, or a landmark disappears overnight.
This is solid, practical infrastructure work rather than a moonshot. The core idea — pooling visual features across vehicles to build shared maps — is well-established in academic SLAM research, but Qualcomm is patenting a specific end-to-end pipeline that fits their chip-and-platform business. The similarity-metric-based fusion step is the interesting wedge here: it's the mechanism that makes crowd-sourced maps coherent rather than noisy. Worth watching as autonomous driving shifts from 'each OEM builds its own map' to shared, continuously updated infrastructure.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.