Microsoft Patents a Way to Pilot Robots From Inside a Teams-Style Meeting
Microsoft is patenting a setup where a person can steer a robot in the field without leaving their shared workspace, using the same kind of session interface already familiar from online meetings.
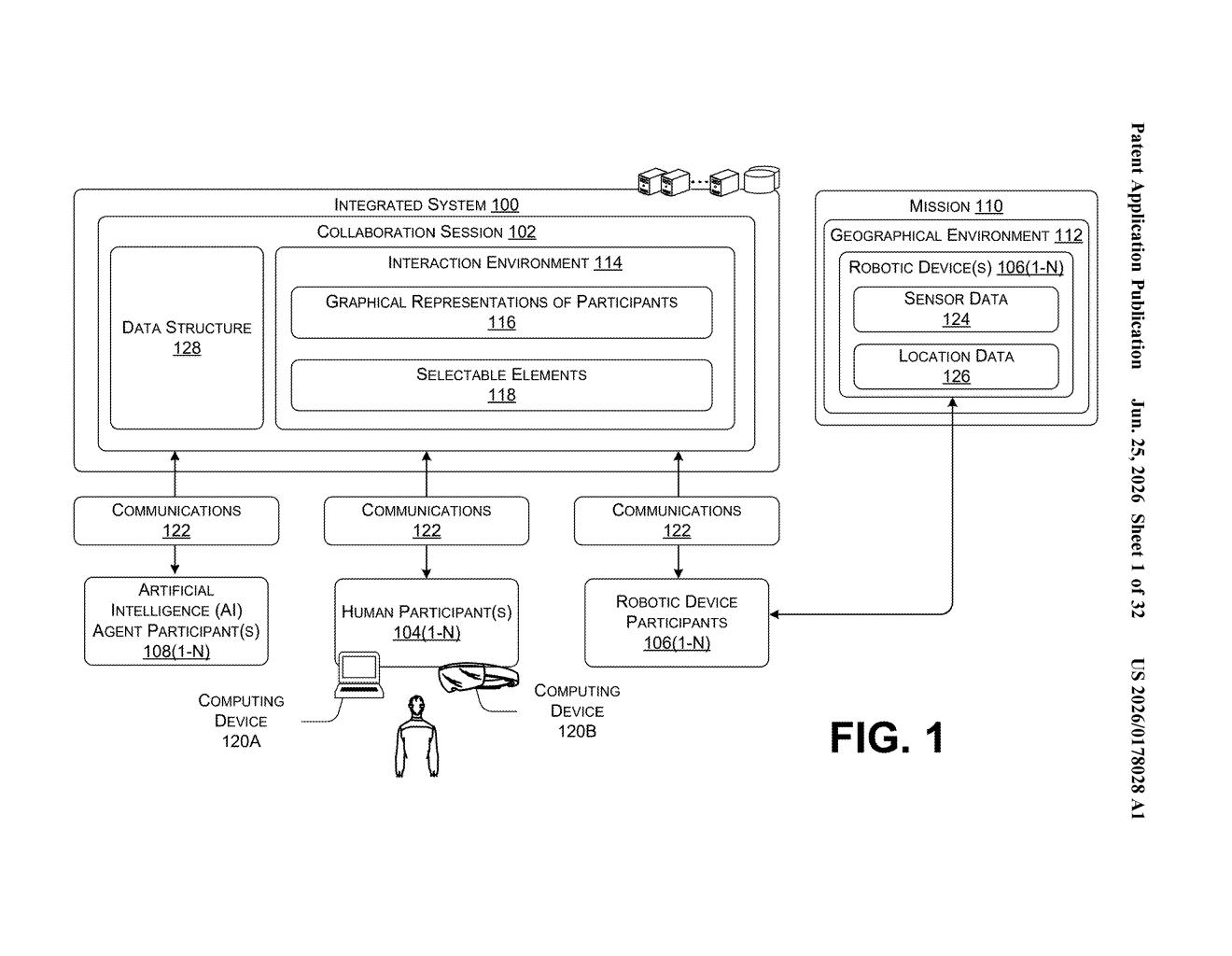
What Microsoft's robot-teleoperation session actually does
Imagine a warehouse fire, a collapsed building, or a remote construction site. Right now, if you want a human to take over from an autonomous robot, they have to switch tools, open separate software, and basically break out of whatever coordination is already happening. This patent describes a different approach.
Microsoft's system lets a human operator steer a robot from inside an existing collaboration session, the kind of shared workspace you might picture as a more capable version of a video call. The session includes not just the human but also one or more robots and AI agents, all working together toward a mission with specific goals.
When a situation calls for human judgment, a control element (basically a joystick-style interface built into the session) appears for the human. They input a command, and the system immediately passes a steering instruction directly to the robot in the field. No app-switching, no handoff friction.
How the collaboration session sends steering commands to a robot
The patent describes a collaboration session as a structured shared environment that simultaneously hosts a human participant, one or more robotic device participants (physical robots operating in the real world), and one or more AI agent participants (software agents that may handle parts of the mission autonomously).
All of these participants are organized around a mission: a defined objective set within a geographical environment, broken down into tasks. Think of it like a project board, except some of the workers are robots and some are AI processes.
When the system determines that a human needs to take direct control of a robot, it activates a control element inside the interaction environment already displayed on the human's device. That control element captures the human's input and the session infrastructure transmits a teleoperation instruction to the robot in near-real time.
- The session manages all participants together rather than treating robot control as a separate system
- The control element is context-aware, appearing within the mission workflow rather than as a standalone tool
- AI agents remain active during human takeover, potentially handling other tasks in parallel
What this means for remote work and physical robotics
The practical bet here is that human-robot collaboration breaks down at the handoff point. Today, remote operators typically use purpose-built teleoperation software that is completely separate from whatever coordination tools the rest of a team is using. Folding robot control into a shared session means a human supervisor could be watching an AI agent complete one task while simultaneously grabbing the wheel on a different robot without ever changing screens.
This matters most in scenarios where you need both autonomous capability and human judgment in the same operation, like emergency response, industrial inspection, or logistics. It also positions Microsoft's collaboration infrastructure (think Teams or a successor) as the nerve center for physical-world operations, not just office chat.
This is a real strategic signal, not a minor tweak. Microsoft is essentially arguing that its collaboration platform should be the control surface for robotic systems, which is a bold expansion of what 'productivity software' means. Whether it ships as a Teams feature or as part of an enterprise robotics stack, the direction is clear: Microsoft wants to own the interface layer between humans, AI, and physical machines.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.