Nvidia Patents a Teacher-Student AI Loop for Dexterous Robot Grasping
Teaching a robot hand to reliably pick up an arbitrary object is one of the hardest unsolved problems in robotics. Nvidia's latest patent tries to crack it by pairing a physics-math trick called 'geometric fabrics' with a two-stage AI training system that goes from simulation to the real world using nothing but depth-camera images.
How Nvidia trains robot hands to grab real objects
Imagine you want to teach someone to pick up objects while blindfolded — relying only on touch and a rough sense of where things are. That's roughly the challenge Nvidia is tackling here for robot arms and hands.
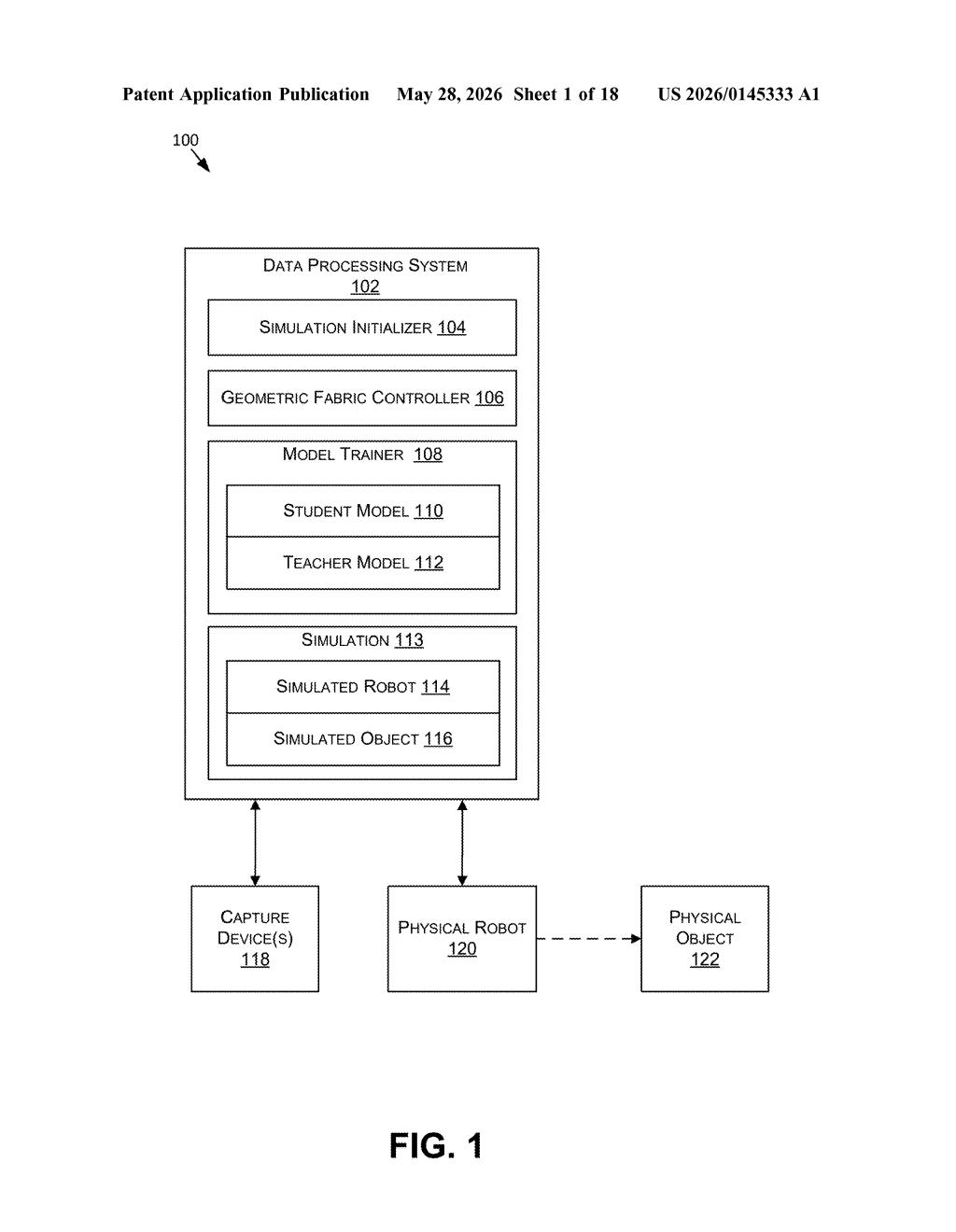
The patent describes a two-teacher-and-student approach. First, an AI teacher model learns to control a simulated robot using rich, detailed information about the virtual world — exact positions, velocities, everything. Then a student model watches the teacher but only gets a depth image (a grayscale map of how far away things are, like what an Xbox Kinect produces) as its input. The student has to figure out how to match the teacher's skill using only that limited camera view.
Once trained in simulation, the student model is dropped into the real world. A real depth camera feeds it images of a real object, and the robot tries to grasp it — no hand-coded rules, no extra sensors needed. The glue holding all of this together is something called a geometric fabric, a mathematical structure that keeps the robot's motion smooth and physically consistent throughout.
How geometric fabrics guide the arm-hand control pipeline
At the center of this patent is a concept called a geometric fabric — a mathematical framework (rooted in Riemannian geometry) that defines how a robot's joints and links should move through space in a way that respects physical constraints, avoids collisions, and stays smooth. Think of it like a stretchy mesh overlaid on the robot's possible movements: actions that would cause collisions or jerky motion get "pulled away" by the fabric automatically.
The training pipeline has two phases:
- Teacher training: A teacher model is trained in a physics simulator using full state information — exact object position, robot joint angles, velocities, everything. It learns to output actions that feed into the geometric fabric to guide the robot toward a successful grasp.
- Student distillation: The student model is trained to mimic the teacher, but with a crucial constraint — it only receives a depth image (a per-pixel distance map from a depth sensor) as input, not the rich state data the teacher had. This forces the student to infer what it needs from realistic, sensor-like data.
At inference time — meaning in the real world — the student model takes a depth image of the actual environment, predicts the right actions, and feeds them into the geometric fabric, which converts them into smooth joint-level commands for the physical robot arm and hand.
The sim-to-real transfer (making skills learned in simulation work on physical hardware) is handled implicitly by the depth-image bottleneck: depth images look similar whether they come from a simulator or a real camera, so the gap between virtual training and real deployment narrows considerably.
What this means for next-gen warehouse and humanoid robots
Reliable dexterous grasping — a robot confidently picking up unfamiliar objects with a multi-fingered hand — remains a major bottleneck for humanoid robots and industrial automation. Most current systems either rely on hand-engineered controllers that break outside their tested range, or end-to-end learned policies that need enormous amounts of real-world data to train. Nvidia's approach tries to shortcut both problems: geometric fabrics handle the physics-safety layer, while the teacher-student setup means all the hard training happens in simulation.
For Nvidia specifically, this fits directly into its push to be the platform provider for robotics AI — from the Isaac simulation stack to hardware accelerators. If geometric fabrics and depth-image policies become a standard toolkit for robot manipulation, Nvidia's simulators and GPUs sit at the center of that pipeline. You probably won't interact with this directly, but if warehouse robots or humanoid assistants get meaningfully better at picking things up in the next few years, methods like this are likely part of why.
This is solid, technically credible work on one of robotics' genuinely hard problems. The geometric fabrics framework is a real research direction (Nvidia's robotics team has published on it), and the teacher-student sim-to-real setup is a proven strategy — this patent is a coherent combination of both applied to dexterous manipulation. It's not a moonshot claim; it's the kind of incremental-but-meaningful engineering that actually ships into products.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.