Sony Patents a Robot Navigation System That Imagines What's Around the Corner
Before taking a step, Sony's patented system has a robot mentally simulate what it would see if it shifted its position or tilted its sensors — and then use that imagined view to plan a smarter route.
How Sony's robot mentally 'looks around' before moving
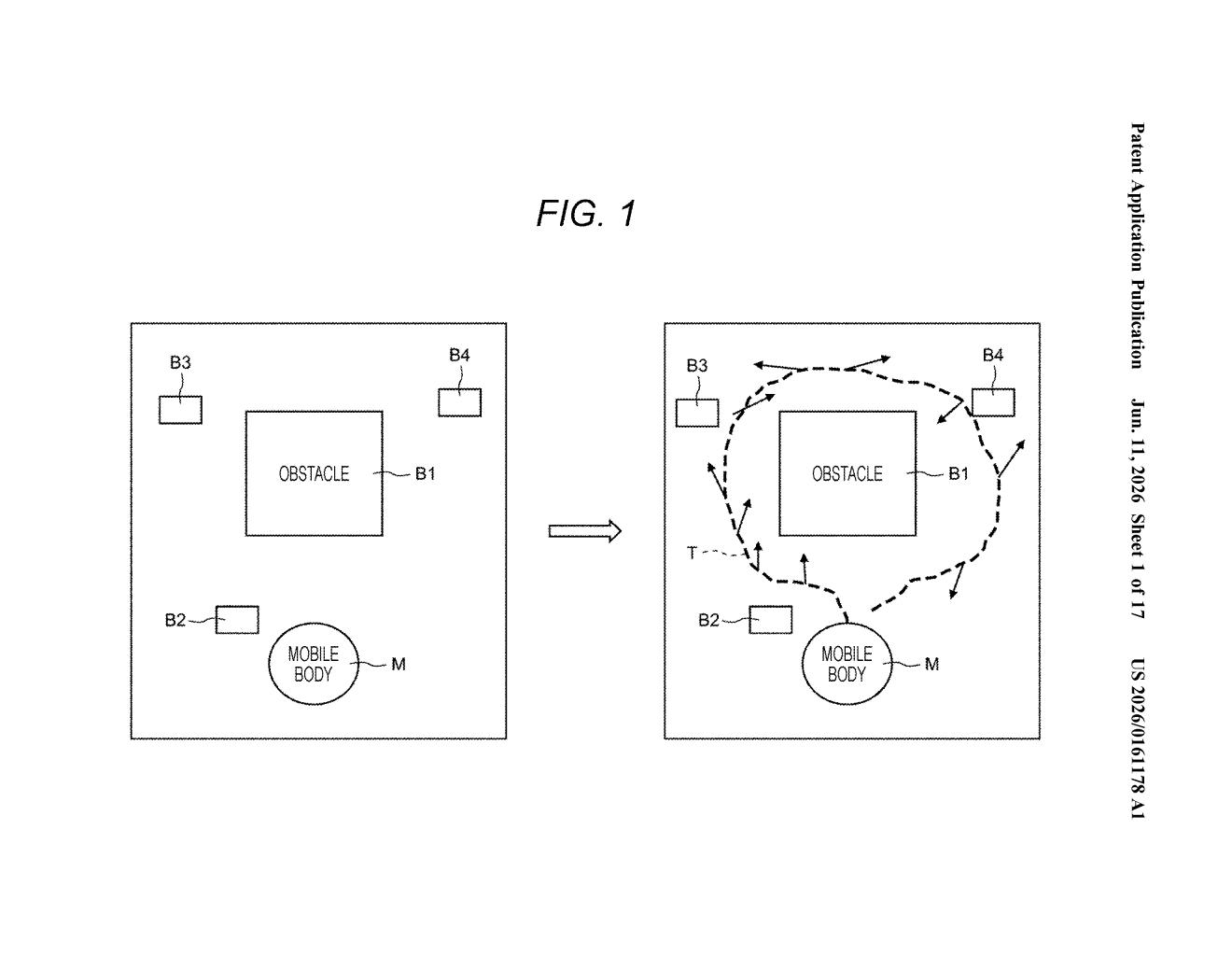
Imagine you're trying to navigate a dark room. You could shuffle forward blindly, or you could mentally picture what the space might look like from slightly different angles before you move. Sony's new patent does something similar for self-driving robots.
The system takes a robot's current sensor reading — essentially a 3D snapshot of the terrain around it — and uses that to predict what the terrain would look like if the robot were standing a little to the left, tilted slightly, or positioned a few inches forward. It generates several of these imagined views, then ranks all of them, including the real one, by how reliable each estimated map seems.
If the robot's actual current position produces the most trustworthy map, it stays put and plans a route from there. If a simulated nearby position looks more promising, the system factors that into how it moves next. The goal: explore unknown spaces more efficiently, without wasting movement on dead ends.
How the system simulates and scores alternate sensor viewpoints
The patent describes a three-part processing pipeline designed for autonomous mobile robots — things like warehouse bots or exploration drones — operating in spaces they've never seen before.
- Step 1 — Baseline scan: The robot's sensor (likely LiDAR or a depth camera) captures a 3D map of the terrain from its current position and orientation, called the initial posture observation three-dimensional terrain.
- Step 2 — Simulated alternate views: A surrounding posture observation three-dimensional terrain estimation unit uses that baseline scan to mathematically infer what the terrain would look like from several nearby positions or orientations — without physically moving to those spots. These are the 'surrounding posture' terrains.
- Step 3 — Reliability scoring and route planning: A surrounding terrain estimation unit combines all these views — real and simulated — into terrain estimates, each tagged with a reliability score. The control unit then plans the robot's next route and posture based on whichever estimate is most confident. If the current position scores highest, movement begins from there.
The core insight is that physically repositioning a robot to get a better sensor angle is expensive in time and energy. Simulating those alternative views computationally — and only moving when necessary — lets the robot explore more efficiently.
What this means for autonomous robots in unknown spaces
For robots navigating warehouses, disaster sites, or any environment they haven't mapped in advance, wasted movement is a real cost — in time, battery life, and mission reliability. A system that can virtually 'look around' before committing to a path could meaningfully reduce how often a robot gets stuck, backtracks, or misreads its surroundings.
Sony has been expanding its robotics and sensing ambitions for years, and this patent fits squarely into the autonomous navigation stack that underpins everything from delivery robots to industrial inspection drones. It's not a flashy consumer product, but it's the kind of foundational navigation logic that makes every downstream robot application work better.
This is solid, unglamorous navigation research — the kind of work that doesn't ship as a product but ends up embedded in every robot Sony or its partners ever deploys in an unstructured environment. The reliability-scoring approach is a genuinely useful framing: instead of just picking the best-looking map, the system admits uncertainty and acts on it. Worth tracking if you follow robotics autonomy.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.