Nvidia Patents a Way to Teach AI How Soft and Flexible Objects Bend Under Pressure
Getting a computer to realistically simulate a squishy, stretchy, or bendable object is genuinely hard — and making that simulation fast enough to train AI on is even harder. Nvidia's new patent takes a neural network shortcut to solve both problems at once.
What Nvidia's elastic object simulation actually does
Imagine you're trying to teach a robot arm how to pick up a stress ball without squishing it too hard. To do that in software, you need a physics simulation that accurately models how the ball deforms when squeezed — and that simulation needs to be fast enough to run millions of times during training.
The traditional way to do this involves carving up a 3D object into thousands of tiny chunks and doing math on every single one. It works, but it's expensive. Nvidia's patent describes a system that uses a neural network to essentially figure out the most useful spots inside an object to sample — so the simulation can stay accurate while doing far less brute-force computation.
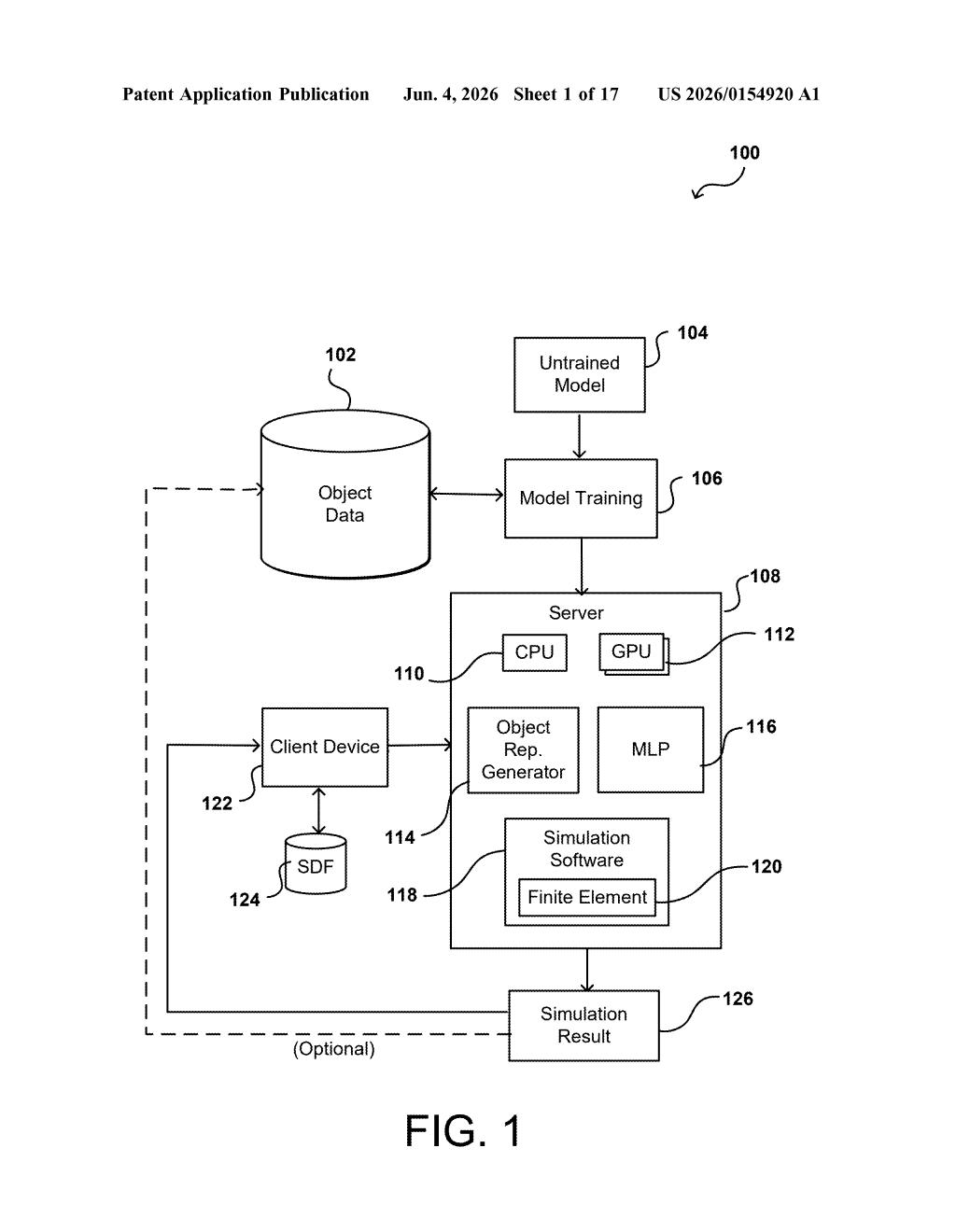
The whole process starts with a mathematical description of the object's surface, then a trained neural network steps in to pick the key interior points. A standard physics technique called finite element analysis (think: structured stress-testing of materials) runs on just those points. The result is a simulation that's both physically realistic and easier to optimize — which is exactly what you need when training AI in virtual environments.
How the SDF grid and neural quadrature points work together
The patent describes a pipeline for running differentiable elasticity simulations — simulations where you can not only watch an object deform, but also mathematically trace how each deformation depends on every input parameter. That "differentiable" property is what makes these simulations useful for machine learning: gradients can flow backward through the physics, letting an AI model learn from simulated physical outcomes.
The process starts with a signed distance function (SDF) — a mathematical representation of an object's surface where each point in a 3D grid gets a scalar value indicating how far it is from the object's surface (positive = outside, negative = inside). The system uses these values to identify which grid cells sit on the boundary of the object.
Here's where the neural network comes in: a multilayer perceptron (MLP) — a standard feed-forward neural network — takes the SDF scalar values for each boundary cell and predicts a set of quadrature points (strategically chosen sample locations inside the object's volume). Quadrature points are the spots where the math actually gets evaluated; choosing them well is the difference between an accurate result and a sloppy one.
- Finite element analysis (FEA) — a standard engineering technique for calculating how materials deform under stress — then integrates over these inferred points
- The system supports both continuous (smooth surface) and discrete (mesh-based) geometric representations
- The full pipeline remains differentiable end-to-end, meaning gradients can pass through the physics for optimization or AI training
What this means for robotics training and 3D simulation
Physics simulation is the backbone of modern robotics training and digital content creation — whether you're teaching a robotic hand to manipulate objects or building a game engine that handles soft-body collisions. The core bottleneck has always been accuracy vs. speed: high-fidelity simulations are too slow for real-time AI training loops, and fast approximations aren't physically accurate enough to transfer back to the real world.
This patent's approach — using a neural network to intelligently choose where to sample rather than brute-forcing every element — could make differentiable physics practical at scales where it wasn't before. For you as a developer or researcher, that means faster iteration when training robot policies in simulation, or more realistic deformable objects in real-time rendering pipelines. Given Nvidia's existing investments in Isaac Sim and Omniverse, this fits directly into their push to make simulation a first-class tool for AI development.
This is genuinely interesting foundational work, not a marketing patent. The combination of implicit surface representations with learned quadrature is a real technical contribution to differentiable simulation — a field that matters a lot for robotics and physically-based AI. It's the kind of patent that won't make headlines today but could quietly end up in every serious simulation stack within a few years.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.