Zoox Patents a Way to Stop Self-Driving Cars from Missing Thin Objects
When a self-driving car scans the world in 3D, thin or sparse features like a truck's side mirror or a bike's handlebar tend to get lost in the noise. Zoox's new patent addresses that blind spot with a clever fix during model training itself.
How Zoox teaches its AV to notice side mirrors and bumpers
Imagine you're teaching a robot to recognize cars by looking at a 3D point cloud — basically a map made of millions of tiny dots in space. Dense, boxy parts of the car (the doors, the hood) show up as big clusters of dots, so the model learns them easily. But a side mirror? That's just a handful of scattered dots hanging off the edge, and the model often ignores them.
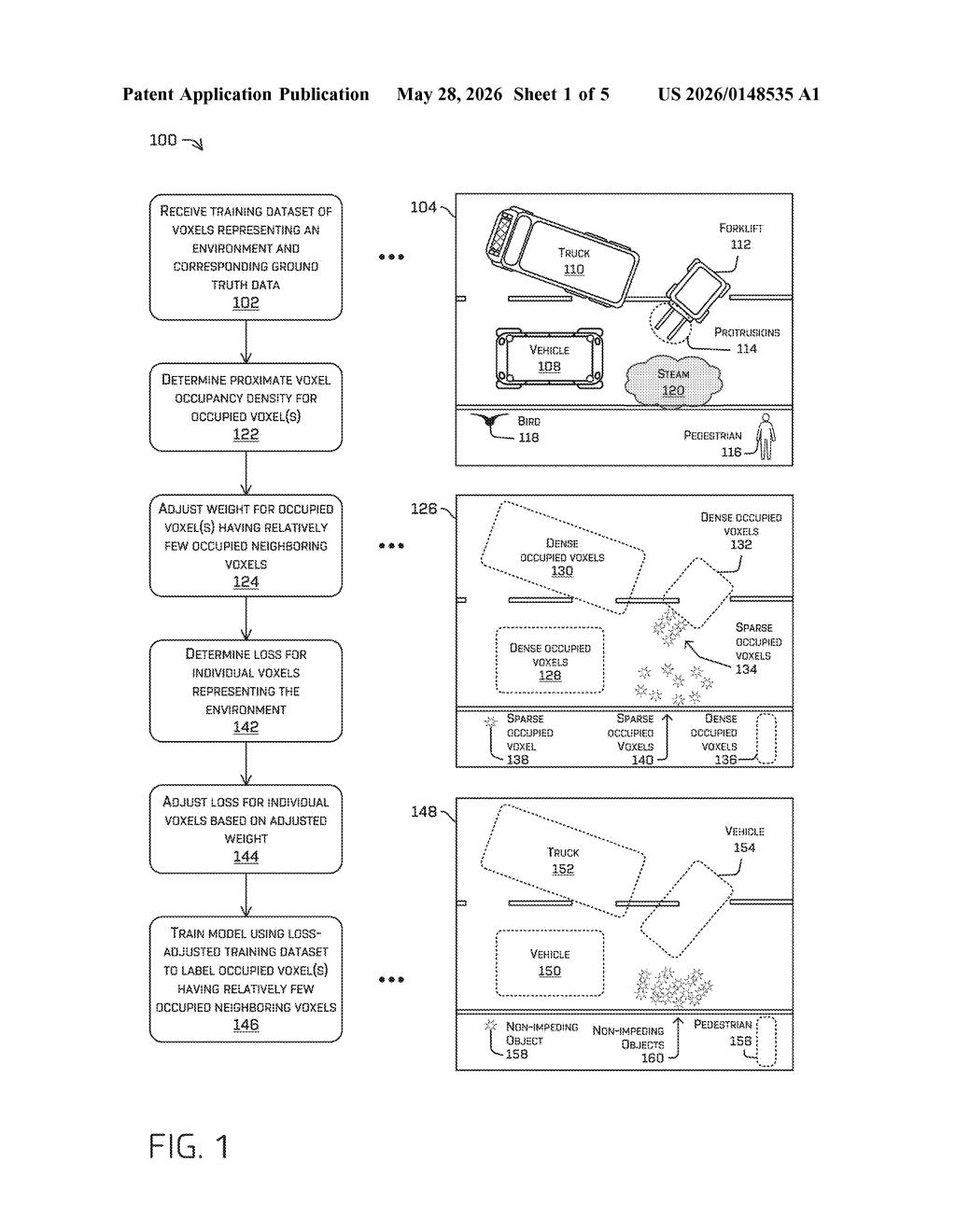
Zoox's patent describes a way to fix that during the training process, before the car ever hits the road. The key idea: if a 3D voxel (think of it as a tiny cube in space) is surrounded by few other occupied voxels, the system treats errors on that voxel as more important to fix. Sparse features get extra attention during learning.
The result is a model that's better at identifying the full physical shape of an object — including the bits that stick out. For a self-driving car calculating how much space to give a passing truck, knowing exactly where the side mirror ends could matter a great deal.
How occupancy density reshapes the training loss signal
The patent describes a training pipeline for 3D occupancy-based object detection, the kind used in autonomous vehicles to understand what's around them using LiDAR or similar sensor data.
The environment is divided into a grid of voxels (small 3D cubes), and each voxel is labeled as either occupied or empty based on sensor readings. The system then calculates a loss — the standard ML measure of how wrong the model's prediction was — for each occupied voxel.
Here's the novel part: before using that loss to update the model's weights, the system checks how many neighboring voxels are also occupied. This is the occupancy density. A voxel deep inside a solid object (like the center of a car door) has lots of occupied neighbors — high density. A voxel representing a protrusion (like the tip of an antenna) has few — low density.
The loss is then scaled inversely to that density: sparse, isolated voxels get an amplified loss signal, forcing the model to pay closer attention to them during backpropagation (the process by which a neural network learns from its mistakes). The patent notes this logic extends to 2D pixels as well, not just 3D voxels.
What better protrusion detection means for AV safety margins
For autonomous vehicles, object boundary accuracy isn't an abstract ML problem — it directly affects how the car plans its path. An AV that underestimates the width of a truck by ignoring its mirrors might calculate a passing gap that doesn't actually exist. This technique addresses that at the model level, during training, without requiring more sensor data or a bigger model.
Zoox (owned by Amazon) is building a fully driverless robotaxi, so their tolerance for detection errors is lower than most. This kind of targeted loss engineering is exactly the quiet, unsexy work that separates production AV systems from research demos. It's also a technique that could generalize to any sparse-feature detection problem — pedestrian hand detection, cyclist handlebar tracking, or even warehouse robotics.
This is focused, unglamorous ML engineering that solves a real geometric problem in AV perception. It won't make headlines the way a new sensor or chip announcement would, but the inverse-density loss weighting is a clean idea that's likely already influencing Zoox's training pipelines. Worth understanding if you follow autonomous driving ML.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.