Zoox Patents a Two-Stage Collision Check That Covers Both a Route and Its Backup
When a self-driving car spots an obstacle, it needs to decide in a split second whether to hold its course or swerve. Zoox's new patent describes a system that watches both options at the same time, before the car even needs to choose.
How Zoox's robotaxi watches two paths at once
Imagine you're driving and a pedestrian steps off the curb ahead. In that moment, you're not just thinking about your current lane, you're also mentally checking whether moving right or braking would cause a different problem. Zoox wants its autonomous vehicles to do the same thing, automatically.
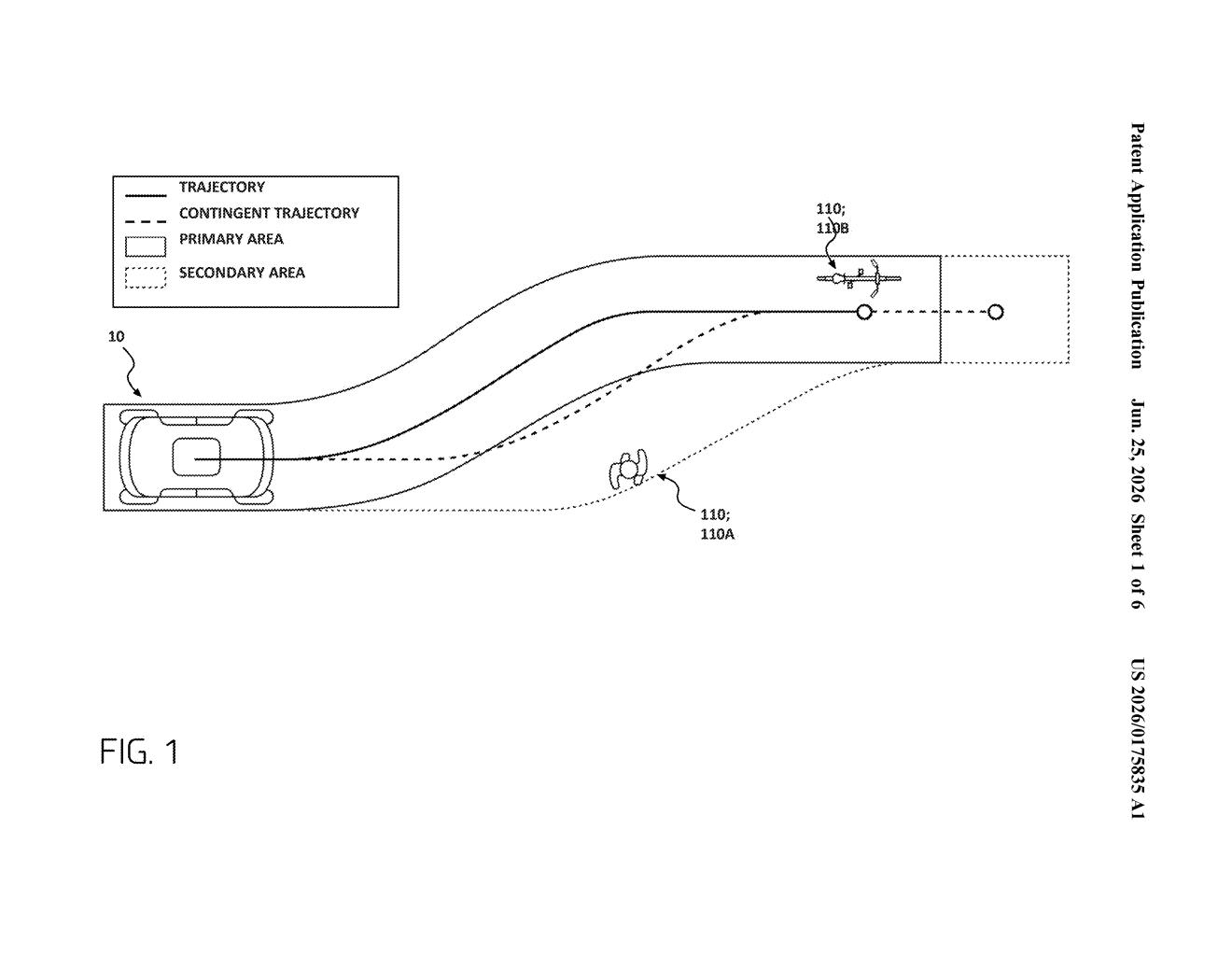
The system maps out two zones simultaneously: the area the car will sweep through on its planned route, and the area it would sweep through on a backup route (like braking hard or pulling slightly aside). It then checks whether any object, a person, a cyclist, a stray shopping cart, overlaps with either zone.
If something is in that combined zone, the car runs a second, more specific check to see whether the object is actually in the path of the main route. That two-step process lets the car pick the smarter response: stick to the plan, or switch to the backup, without wasting precious time re-scanning the whole scene from scratch.
How the two-pass detection system decides which path to take
The patent describes a two-pass collision detection pipeline for autonomous vehicles.
- First pass (wide net): The system combines the area swept by the car's primary trajectory with the area swept by a pre-computed contingent trajectory (a fallback path, such as emergency braking or a minor lateral shift). It checks sensor data to see whether any object falls anywhere in that merged zone. Think of it as drawing a big safety envelope around both options at once.
- Second pass (narrower check): Only if the first pass detects something does the system zoom in and determine whether the object is specifically inside the primary path's sweep zone. This is the more computationally expensive check, so the first pass acts as a cheap filter to avoid running it constantly.
- Decision: Based on both detections together, the system decides whether to keep following the primary trajectory or switch to the contingent one.
The key insight is efficiency: by merging both path zones early, the system avoids running the full detailed check when there's nothing nearby at all. When something is nearby, it already has partial information about which path is safer.
What this means for robotaxi safety decisions
Self-driving car safety often comes down to how quickly and accurately a vehicle can react to unexpected objects. A system that pre-computes a backup path and monitors it continuously, rather than scrambling to generate one after danger is detected, shortens the reaction pipeline in a meaningful way.
For Zoox, which operates a fully driverless robotaxi service in Las Vegas and San Francisco, this kind of layered detection has direct safety stakes. The patent also hints at a broader design philosophy: build the contingency plan into the car's normal perception loop, not as an afterthought triggered only when something goes wrong.
This is solid, unglamorous safety engineering. It won't make headlines the way a flashy AI announcement would, but the logic of checking two paths simultaneously rather than reacting serially is exactly the kind of incremental improvement that accumulates into a meaningfully safer autonomous vehicle over thousands of edge cases. Worth noting for anyone following the robotaxi safety story.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.