Waymo Patents a Hybrid LiDAR System That Untangles Speed and Distance Readings
When a self-driving car's sensor sees several objects at once, knowing how far away something is doesn't help much if you can't also tell how fast it's moving — and which speed reading belongs to which object. Waymo's latest patent tackles exactly that matching problem.
What Waymo's hybrid LiDAR disambiguation actually does
Imagine you're at a busy intersection and your car's sensors spot a cyclist, a bus, and a pedestrian all at the same moment. Your LiDAR needs to know not just how far away each one is, but how fast each is moving — and crucially, it needs to correctly pair each distance measurement with the right speed measurement. Mix those up and you've got a serious problem.
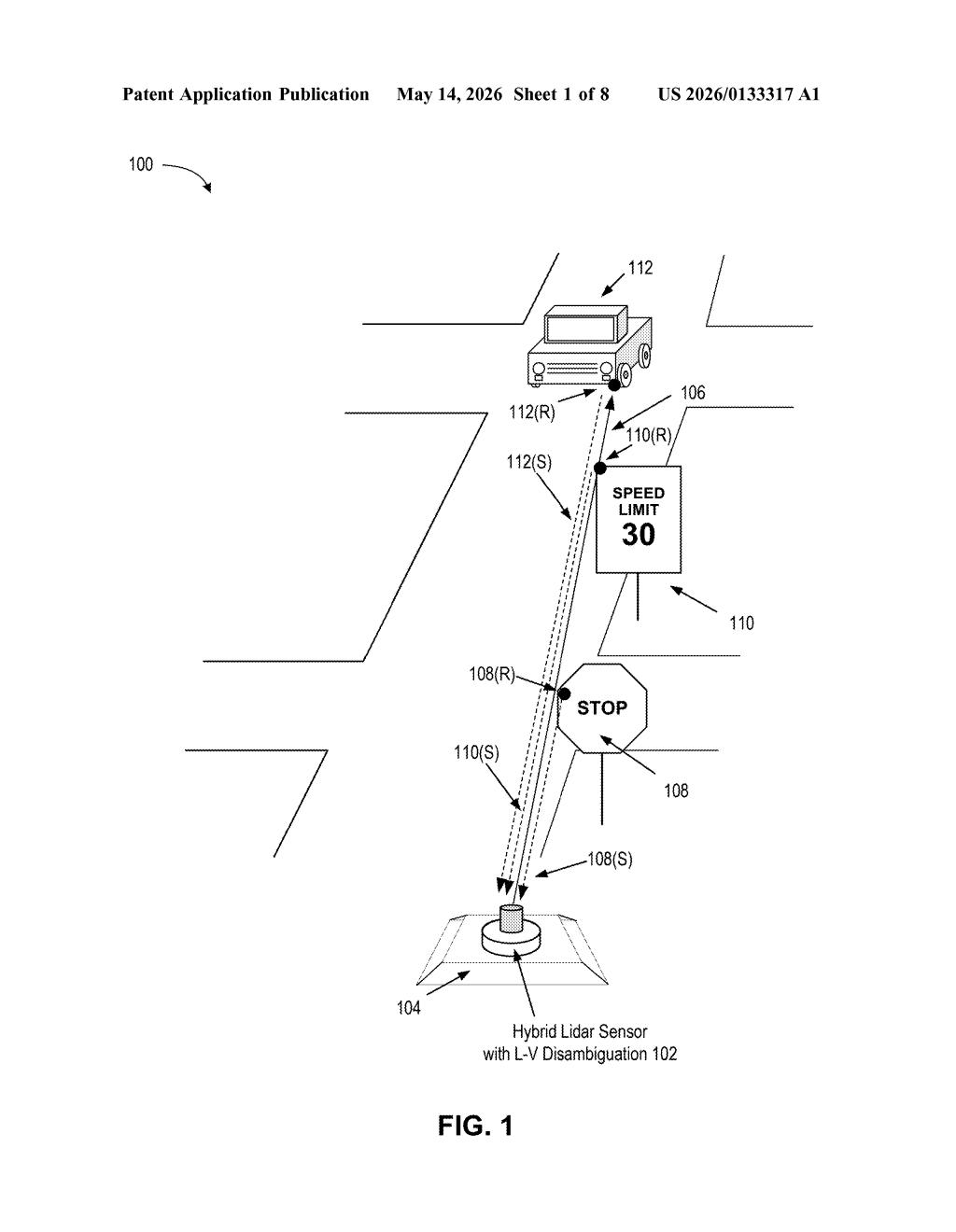
Waymo's patent describes a hybrid LiDAR sensor that fires two types of laser beams simultaneously: a pulsed beam (great for measuring distance) and a continuous beam (great for measuring velocity using the Doppler effect). The trick is figuring out which reflected pulse came back from the same object as which reflected continuous signal.
The system solves this by stamping a unique modulation pattern — think of it like a secret code — onto the continuous beam. When the beams bounce back, the circuits read those coded patterns to correctly link each distance reading to its matching velocity reading, even when multiple objects are in the scene at once.
How pulsed and continuous beams get matched to objects
The patent describes a hybrid LiDAR architecture that combines two laser sources in a single system:
- Pulsed beam: A laser fired in short bursts. The time it takes to bounce back tells you how far away an object is (time-of-flight ranging).
- Continuous beam: A laser fired as a steady stream. Shifts in the returned frequency reveal how fast an object is moving toward or away from the sensor (Doppler-based velocity detection, the same physics behind a radar speed gun).
The core innovation is disambiguation — solving the problem of correctly associating a reflected pulse with the right reflected continuous signal when multiple objects are present. If three objects reflect signals nearly simultaneously, you need to know which velocity reading belongs to which distance reading.
Waymo's approach encodes a modulation pattern (a deliberate variation in the continuous beam's properties — think of it like a watermark) before transmission. When reflections return from the scene, the on-board circuits analyze those modulation signatures to match each pulsed return to its corresponding continuous return. The matching happens at the circuit level, enabling real-time object tracking with both distance and velocity correctly attributed to each individual object.
Why clean LiDAR data is life-or-death for robotaxis
For a robotaxi navigating dense urban traffic, getting distance or velocity wrong is dangerous — getting them swapped between two objects is potentially catastrophic. A system that knows a car is 20 meters away and decelerating is acting on completely different information than one that thinks the car is stationary while a pedestrian behind it is moving fast. Correct pairing is foundational to reliable perception.
This patent also signals Waymo's continued investment in sensor-level intelligence — pushing disambiguation logic into the hardware and circuit layer rather than relying entirely on software post-processing. That approach tends to reduce latency and computational overhead, both of which matter when you're making split-second decisions at highway speed.
This is genuinely important work in the unglamorous middle layer of autonomous vehicle engineering — the part between 'the sensor fires' and 'the car decides what to do.' Getting LiDAR returns correctly attributed to the right objects in a multi-target scene is a real, hard problem, and encoding modulation patterns into the continuous beam is an elegant hardware-side solution. It's not a flashy AI story, but it's the kind of patent that quietly makes everything downstream more reliable.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.