Waymo Patents a Machine Learning System for Smarter AV Lane Changes
Changing lanes is one of the trickiest things a human driver does — and it turns out it's just as hard for a robot. Waymo's latest patent describes a machine learning approach that maps out multiple possible lane-change paths, then ranks them by predicting how surrounding traffic will behave.
How Waymo's AV decides when to change lanes
Imagine you're merging onto a highway. You don't just check your mirror once — you're constantly updating your read of the cars around you, guessing who'll speed up, who'll let you in, and which gap is actually safe. That split-second prediction is exactly what's hard to replicate in software.
Waymo's patent describes a system that generates several candidate partial trajectories — think of these as draft lane-change plans — and then checks each one against a predicted picture of what nearby vehicles will do next. The system keeps refining those drafts based on updated predictions, eventually picking the one that's safest.
This isn't a single snapshot decision. The system loops: predict, evaluate, update, repeat. It's closer to how an experienced driver thinks than a simple rule like "merge if the gap is more than X meters."
How predicted traffic states drive Waymo's lane planner
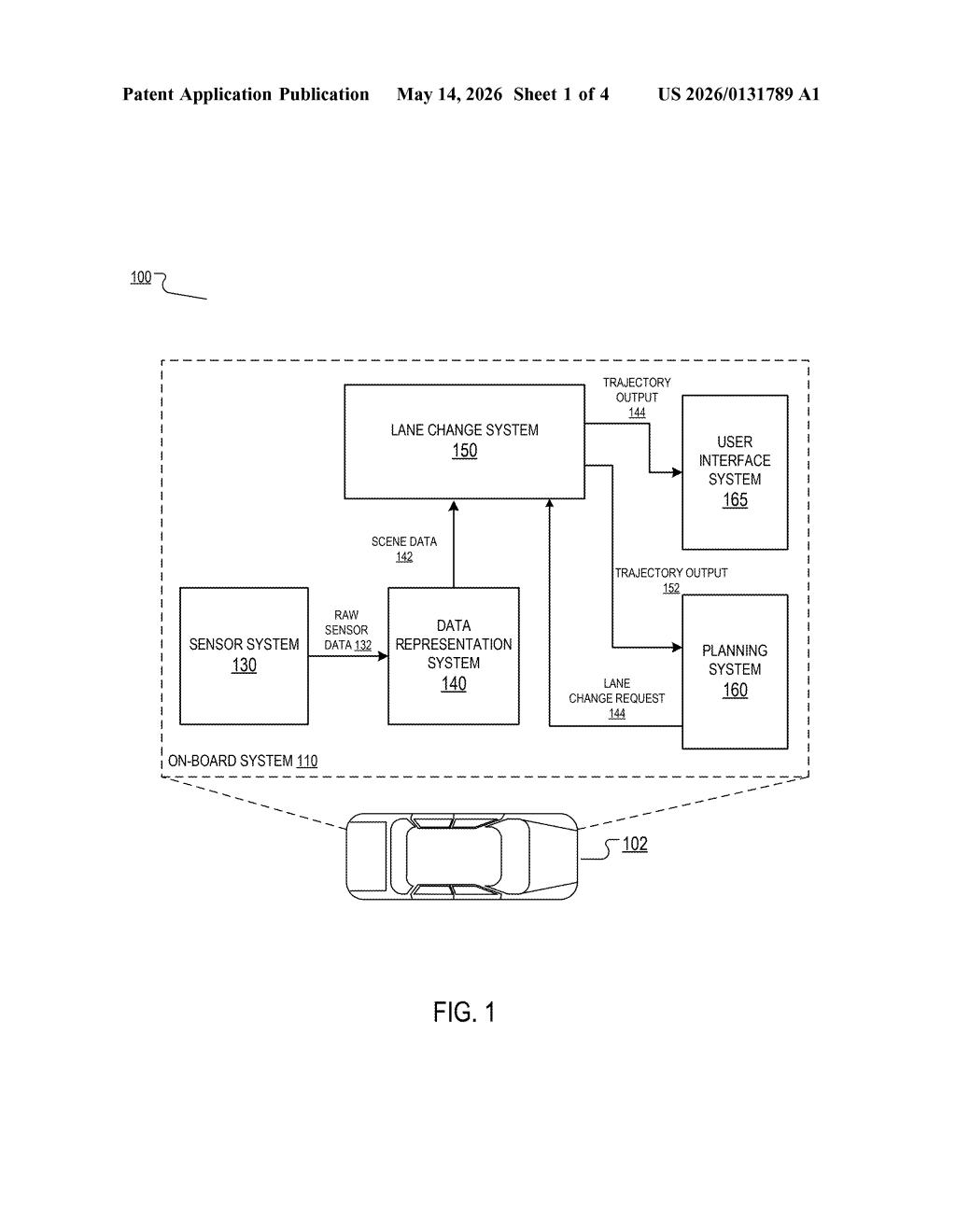
According to the patent's abstract and process diagram, the system works in a cycle built around partial trajectories and predicted states.
- Generate candidate partial trajectories: The planner doesn't commit to one lane-change path. It creates multiple candidate routes — each representing a slightly different way the vehicle could move into the adjacent lane.
- Obtain associated data: For each candidate, the system pulls in data characterizing the predicted state of the environment — essentially, where other vehicles, pedestrians, and obstacles are expected to be at each moment in time.
- Identify relevant locations: The planner flags specific points in the environment that matter most for evaluating each candidate — like the positions of fast-approaching vehicles in the target lane.
- Update and re-evaluate: Based on those predictions, the candidate trajectories are updated and re-scored, with the loop repeating until a best path emerges.
The core idea is that predicted states (what the world around the car is likely to look like a few seconds from now) are tightly coupled to the trajectory evaluation process, rather than being computed once and handed off. This tighter feedback loop is where the machine learning component earns its place.
What smarter lane changes mean for self-driving safety
Lane changes are statistically one of the most dangerous maneuvers on the road — and one of the hardest for autonomous vehicles to nail cleanly. A system that continuously re-evaluates its plan against fresh traffic predictions is meaningfully safer than one that commits to a gap and hopes the world cooperates.
For Waymo specifically, this kind of incremental planning improvement compounds across millions of miles. Even small gains in lane-change confidence translate directly into smoother rides, fewer interventions, and a stronger safety record — which is ultimately what determines whether regulators and riders trust the service enough to scale it.
This is a continuation patent rooted in a 2021 provisional filing, which means the core ideas have been in Waymo's pipeline for years and are likely already influencing production software. It's not a flashy moonshot — it's the kind of careful, iterative planning work that actually makes self-driving cars usable in dense, unpredictable traffic. Worth paying attention to.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.