Samsung's New Patent Teaches Home Robots to Fix Their Own Failed Plans
Most robot AI systems fail silently when they can't figure out how to complete a task. Samsung's new patent describes a system that catches that failure, investigates why, and generates a better plan on the fly.
What Samsung's room-map robot planner actually does
Imagine telling a home robot, "Put the medicine on the kitchen counter." The robot checks its mental map of your home — which rooms exist, which objects are where — and tries to build a step-by-step plan. If the medicine isn't already in the map, the plan falls apart before the robot even moves.
Samsung's patent describes a smarter fallback. When the robot's first plan hits a dead end, the system doesn't just give up. It identifies which part of the map caused the problem, then uses a second AI to gather more detail about that spot — say, scanning the area more carefully or pulling in sensor data — and creates a stand-in entry for the missing object.
With that new information plugged in, the robot tries again with a second, more informed plan. The idea is that a home robot shouldn't require a perfectly complete map to function — it should be able to fill in the gaps as it goes.
How the two AI models hand off when a plan breaks down
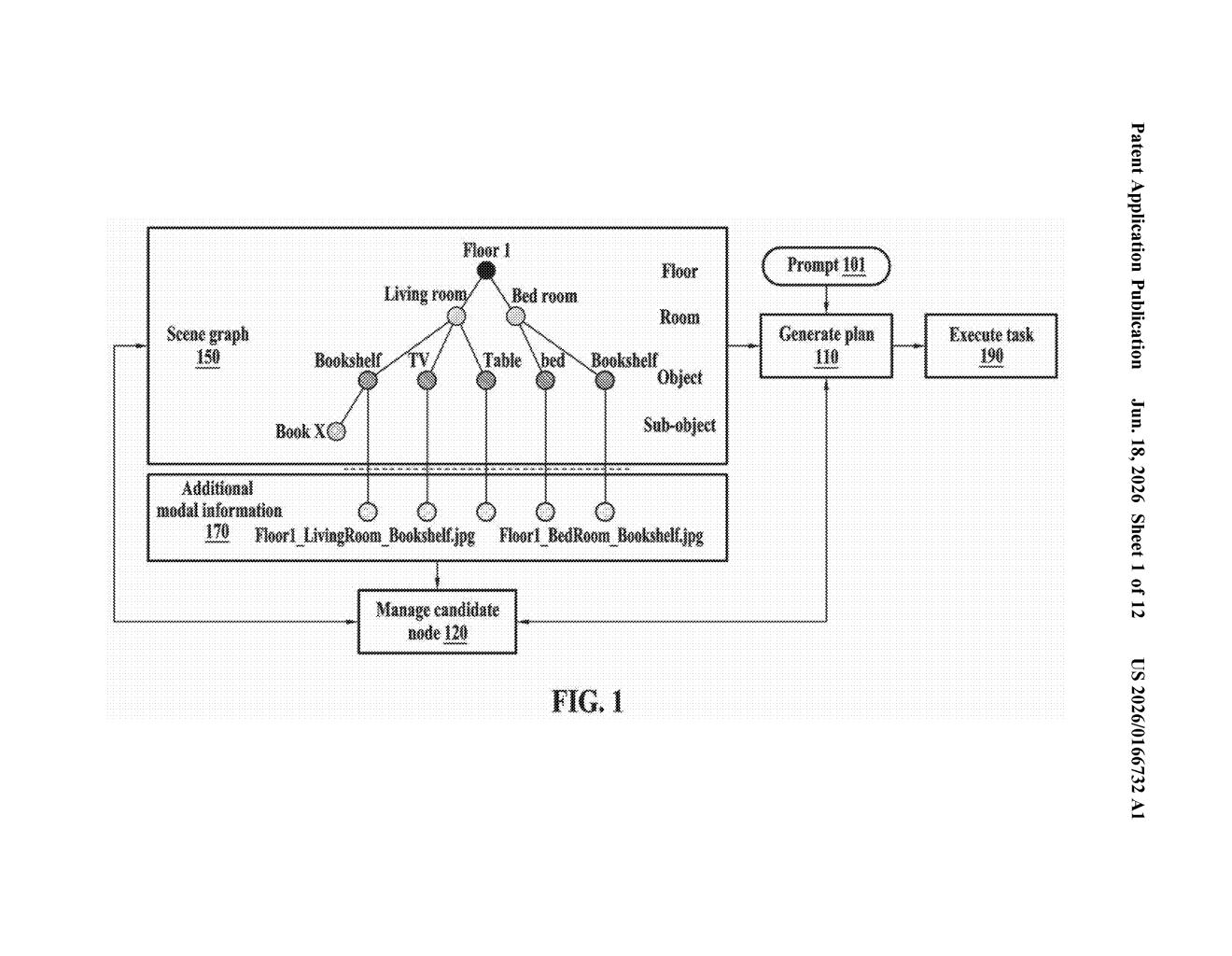
The system centers on what engineers call a scene graph — think of it as a structured, labeled map of a physical space, where every object and location is a "node" and the relationships between them ("the cup is on the table," "the table is in the kitchen") are the connecting lines.
When a user gives the robot a task via natural language, a first AI model takes that instruction and the scene graph together and tries to build a task plan — an ordered list of actions. If the plan can't satisfy the task (because a needed object or location isn't in the graph), the system asks that same model to flag the specific node most relevant to the failure.
A second AI model then kicks in. It takes additional modal data (meaning extra sensory input — camera images, depth sensor readings, or other live data) about that flagged node and uses it to generate a candidate node: essentially a newly created entry that fills the gap in the scene graph.
Finally, the first AI model gets a second shot — this time with the candidate node added to the scene graph — and produces a revised task plan that can actually complete the job.
What this means for Samsung's home robot ambitions
Home robots are only as useful as the maps they work from, and real homes are messy and constantly changing. A system that can recover from an incomplete map — rather than stopping and asking for help — is a meaningful step toward robots that work without constant human babysitting. For Samsung, which has been openly investing in home robotics through its Samsung Bot and related research, this kind of self-correcting planning is exactly the kind of infrastructure a practical home robot needs.
For you as a potential user, the implication is simple: a robot that can figure out it's missing information and go get that information, rather than freezing up or returning an error, is one you'd actually want to own.
This is solid, unglamorous AI infrastructure work — the kind that actually makes robots useful rather than impressive in demos. The two-model handoff for recovering from planning failures is a sensible design, and Samsung filing this suggests their robotics team is thinking seriously about real-world deployment conditions, not just controlled lab settings.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.