Intel Patents a System That Rewrites a Robot's Movement Plan Mid-Task
Most robots follow a fixed plan. Intel's new patent describes a system that continuously updates how a robot moves based on two competing priorities: finishing the job and staying honest about what the robot actually knows about itself.
What Intel's mid-task robot recalibration actually does
Imagine a robot arm on a factory floor trying to pick up a part. Halfway through, its grip sensor starts giving noisy readings. A traditional robot keeps pushing forward with its original plan, even if that plan is now based on bad information. Intel's patent describes a way to avoid that.
The system gives the robot two dials to balance at all times. The first dial tracks how much progress it has made toward finishing the task. The second tracks how confident it is in its own internal model of how it moves and behaves. By adjusting both in real time, the robot can decide whether to push ahead or recalibrate its understanding of itself first.
The result is a robot that can handle surprises without a human stepping in. If its self-model drifts out of sync with reality, it can correct that while still working, rather than stopping, crashing, or producing bad output.
How the system weighs task progress against model accuracy
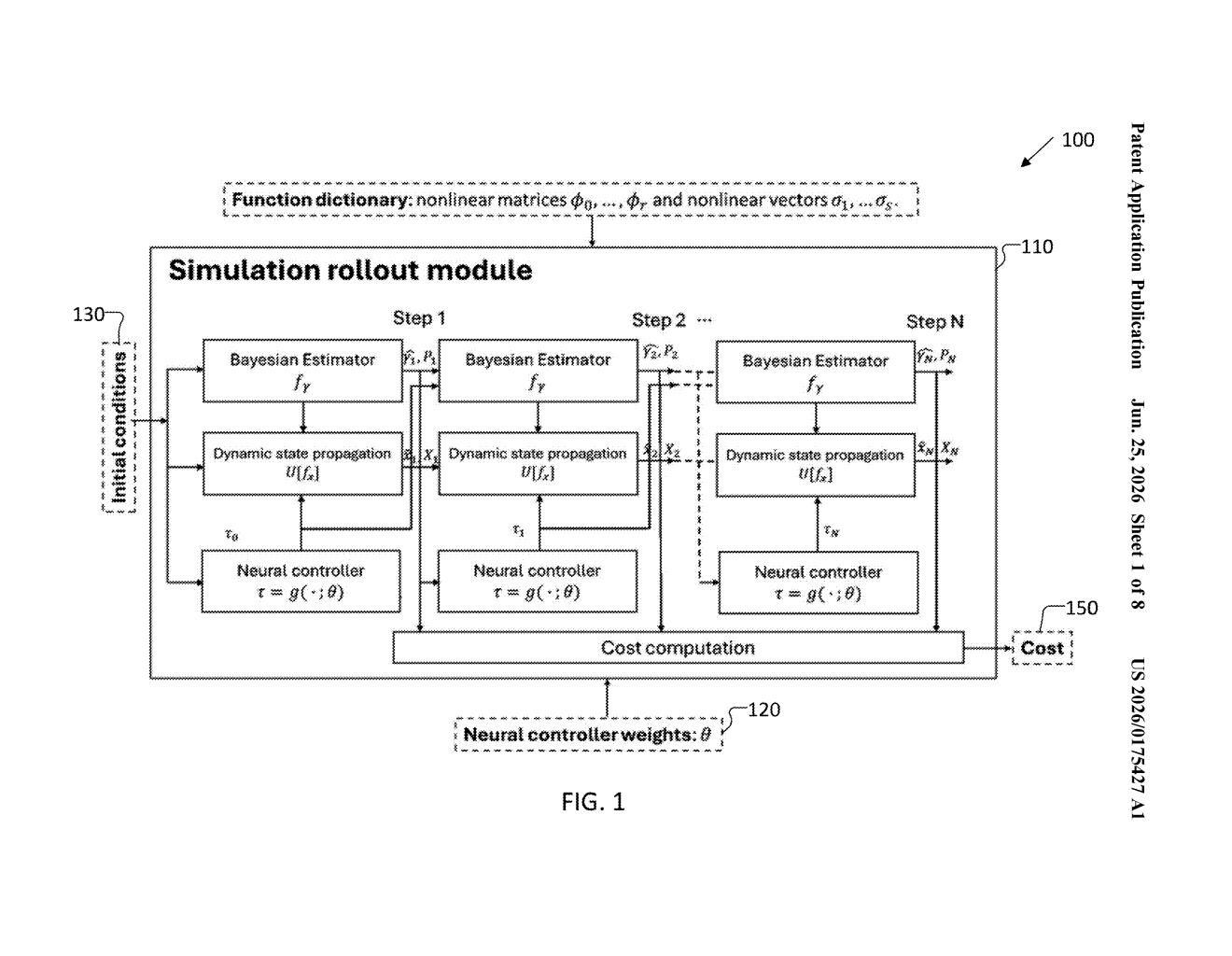
The patent describes a dynamic modeling system that runs on a processor alongside whatever task the robot is performing. It takes in a set of performance parameters, which are essentially two weighted priorities the designer sets before the robot starts working.
- First weight (task compliance): How important it is to keep moving toward completing the assigned task.
- Second weight (modeling metric): How important it is to keep the robot's internal self-model accurate, meaning how well its software understands its own physical behavior.
The system uses those weights to compute control parameters, the specific movement instructions the robot actually follows. If the robot's self-model becomes unreliable (say, a joint starts behaving unexpectedly), the second weight can push the system to spend more effort correcting that model, even if it means slowing down on the primary task.
This is a form of online system identification, a technique where a robot updates its mathematical model of its own body during operation rather than only during a pre-task calibration phase. The patent frames this as a real-time optimization problem, balancing two objectives simultaneously rather than treating them as separate steps.
What this means for industrial robots working in messy environments
Industrial and warehouse robots typically run on pre-calculated models of their own mechanics. When wear, temperature changes, or unexpected loads cause the real behavior to drift from the model, the robot either fails silently or requires a maintenance halt. A system that can detect and correct that drift during operation could meaningfully reduce downtime in high-volume environments.
For Intel, this filing sits at the intersection of edge computing and robotics, an area where the company has been positioning its processors as the brains for autonomous industrial systems. The patent doesn't describe a specific robot product, but the approach is general enough to apply to robotic arms, mobile platforms, or any actuated system where real-time self-correction would be valuable.
This is a solid, specific contribution to the robotics control literature. It won't generate headlines outside of engineering circles, but the problem it addresses (model drift during live operation) is a real and persistent headache in industrial robotics. Whether Intel ships this as part of an edge AI platform or licenses it into partner hardware, the underlying idea is practically useful.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.