Sony Patents a System That Reads Grip Strength From the Marks You Leave Behind
Sony is working on a way to estimate how hard a person squeezed an object — not by measuring it in the moment, but by looking at the trace or mark left behind afterward. It's essentially forensic grip analysis, turned into a machine learning model.
What Sony's grip-trace estimation actually does
Imagine picking up a soft foam ball and squeezing it hard. The dent you leave tells a story — not just that you touched it, but roughly how much force you used. Sony's patent is built on that idea.
The system pairs actual grip force measurements (taken while someone is holding an object) with images of the marks those grips leave on the object's surface. Feed enough of those paired examples into a model, and it learns to work backward: show it a photo of a gripped object, and it can estimate how hard the grip was — even after the person has let go.
This means grip strength could eventually be inferred passively, from a camera image alone, without any wearable sensor or real-time contact measurement. That's a meaningful shift in how systems could understand physical human interaction.
How the model links grip marks to force measurements
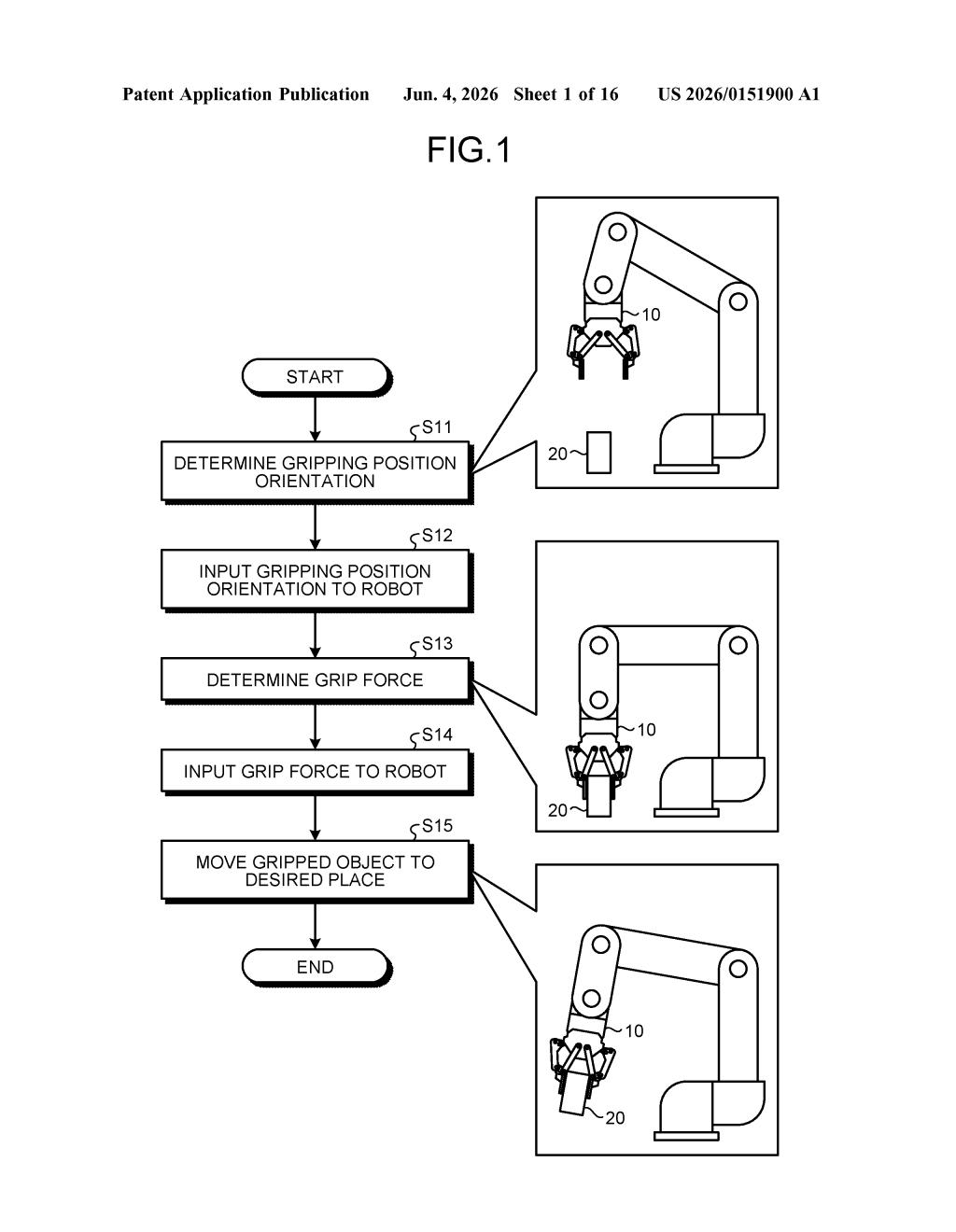
The patent describes a two-part pipeline: an acquisition unit that simultaneously collects grip force data (presumably from a force sensor in or around the object) and captures images of the trace — the visible deformation, indentation, or mark left on the object's surface after gripping. Those two signals are paired together to create labeled training data.
A generation unit then uses that labeled data to train a machine learning model. Once trained, the model accepts an image as input — specifically an image showing the trace a grip left behind — and outputs an estimated grip force value.
- Training phase: record actual grip force + photograph the resulting trace on the object
- Inference phase: feed only a new trace image into the trained model
- Output: a grip force estimate, no real-time sensor required
The key insight is that physical traces encode force information — the shape, depth, and distribution of a mark on a deformable surface correlates with how hard it was squeezed. The model learns that mapping from data rather than from explicit physics equations.
What this means for robotics and human-sensing tech
For robotics and human-robot interaction, understanding grip force is critical — a robot handing you a glass needs to know if you're holding it firmly or barely. Today that usually requires dedicated force sensors embedded in objects or worn on hands. A vision-based approach that works from traces alone could dramatically reduce hardware complexity.
Sony's involvement also points toward applications in gaming controllers, VR/AR haptics, or assistive technology, where understanding how users physically interact with objects could improve feedback systems. There's also a passive-monitoring angle: if grip traces on everyday objects can be analyzed from camera images, it could feed into health or rehabilitation monitoring without the user doing anything special.
This is a quietly interesting sensing patent. The core idea — that a deformation trace is a compressed record of the force that caused it — is elegant, and training a model to decode it is a practical approach. It's not a flashy consumer product patent, but it's the kind of infrastructure-level capability that would matter a lot inside a robotics or haptics pipeline.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.