Nvidia Patents a System That Blends Real Camera Feeds With Digital Twin Simulations
What if a self-driving car or robot could see the world through two lenses at once — one real, one simulated — and blend the best of both? That's exactly what this Nvidia patent proposes.
How Nvidia mixes real camera footage with simulated scenes
Imagine you're teaching a robot to navigate a warehouse. Real cameras give you accurate footage, but low-light corners and rare hazards are hard to capture consistently. A simulation can fill in those gaps — but purely synthetic images often look too perfect and don't reflect messy reality.
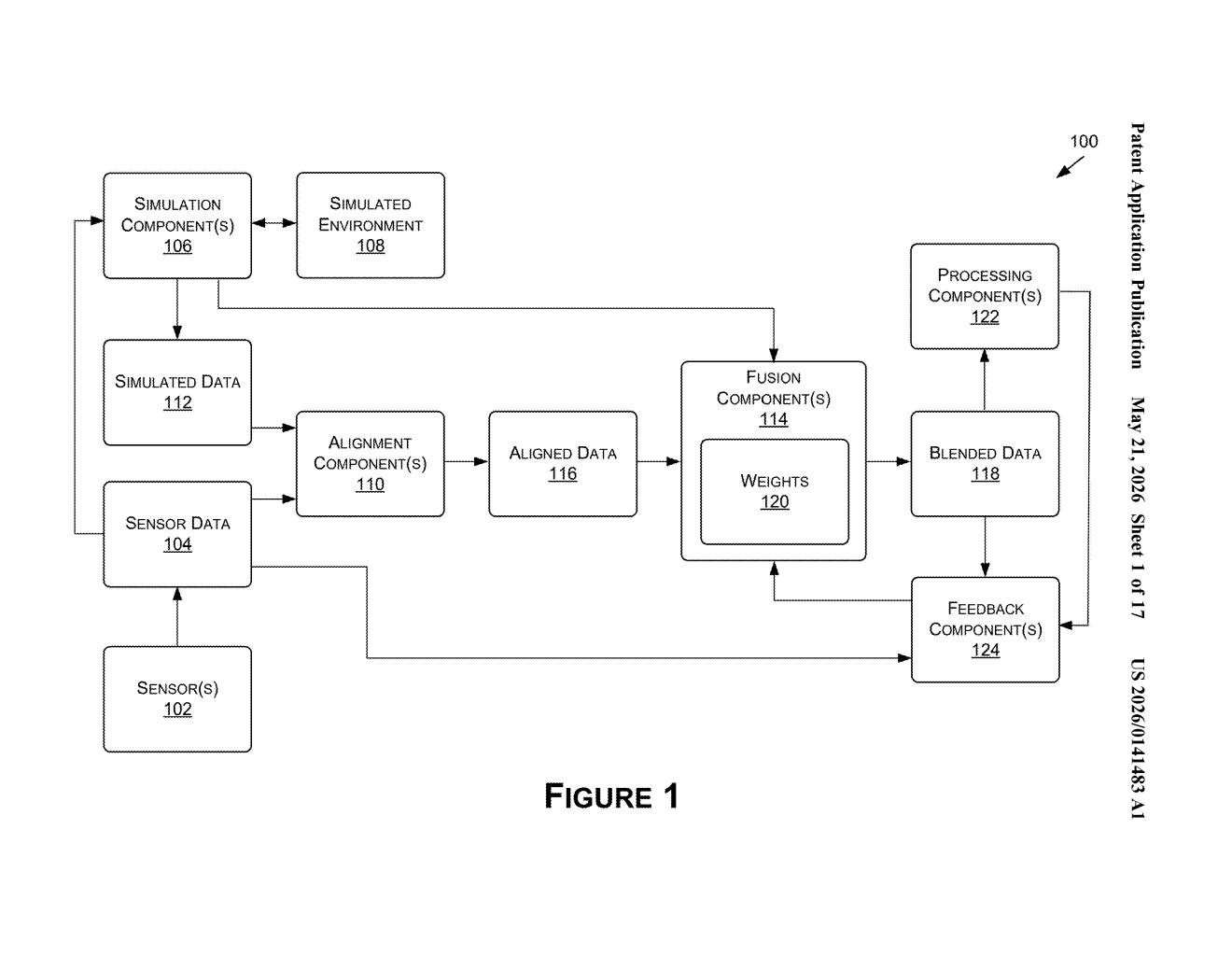
Nvidia's idea is to blend the two together. A machine running in the real world captures live camera images. At the same time, a digital twin — a virtual copy of the same environment — generates matching simulated images of that exact spot. The system then combines both using weighted mixing, so you can dial up the simulation or the real footage depending on what the situation calls for.
The resulting "blended image" gets fed back to the machine, which uses it to make navigation or operational decisions. It's a bit like adjusting the contrast on a photo, except instead of tweaking brightness, you're tuning how much reality versus simulation the machine "sees" at any given moment.
How the weighting system fuses real and sim image data
The patent describes a pipeline where a machine — think an autonomous vehicle, warehouse robot, or inspection drone — simultaneously receives real-world image data from its onboard sensors and simulated image data from a digital twin of the same environment.
A key detail in the abstract is that real images are noted to often have lower lighting levels than their simulated counterparts, which makes direct comparison tricky. The system addresses this by assigning separate weights to each image source — a first weight for the real image, a second weight for the simulated one. These weights determine how much each source contributes to the final blended output.
The core output is a blended image generated by fusing both sources according to those weights. The claim structure also hints at a feedback component, suggesting the system can adjust weights dynamically — for example, leaning more heavily on simulation data when real-world sensor quality degrades (poor lighting, sensor noise, occlusion).
The machine then uses this blended image to drive actual operations, closing the loop between perception and action. The method is framed broadly enough to apply to
- Autonomous vehicles navigating real roads with digital twin-assisted perception
- Industrial robots operating in mapped facilities
- Any semi-autonomous system where sensor data alone is unreliable
What this means for autonomous vehicle and robotics training
The persistent challenge in autonomous systems is the sim-to-real gap — models trained on simulation often stumble in messy real-world conditions, while purely real-world data is expensive and dangerous to collect at scale. Nvidia's approach sidesteps the binary choice by letting both streams coexist and be tuned in real time.
For you as a watcher of the autonomous vehicle and robotics space, this patent signals that Nvidia is investing in infrastructure that makes its Omniverse digital twin platform not just a training tool, but a live perception aid. If this approach scales, it could reduce how many real-world miles a machine needs to log before it's safe to deploy — which is a significant cost and timeline lever for anyone building autonomous systems.
This is genuinely interesting infrastructure work from Nvidia, not a flashy headline grab. Blending live sensor data with real-time digital twin output is a meaningful architectural move that could shrink the sim-to-real gap in production systems, not just training pipelines. The weighted fusion approach is the practical engineering detail worth watching — it turns a philosophical idea into something you can actually tune.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.