Qualcomm Patents a Context-Aware Object Detection Filter for Self-Driving Cars
Most object detectors treat every part of the frame equally — but Qualcomm's new patent lets a car's vision system raise or lower its standards depending on what actually matters in the scene.
What Qualcomm's saliency-driven car vision actually does
Imagine your car's camera spots what might be a pedestrian near the edge of the frame, in a low-contrast shadow. A standard object detector either flags it (risking false alarms) or ignores it (risking a miss). The core problem is that a flat confidence cutoff doesn't know which parts of the image deserve extra scrutiny.
Qualcomm's approach adds a "saliency map" — essentially a heat map that highlights the visually important regions of the camera feed. The system then adjusts its confidence threshold based on that heat map: areas flagged as high-importance get a lower bar for reporting a detection, while cluttered or unimportant background regions get a stricter filter.
The whole pipeline works in a Bird's Eye View format — a top-down representation that's standard in autonomous driving — so the refined detections slot neatly into the kind of spatial reasoning a self-driving stack already uses. The goal is fewer missed detections where it counts and fewer false alarms everywhere else.
How the BEV projection and saliency maps work together
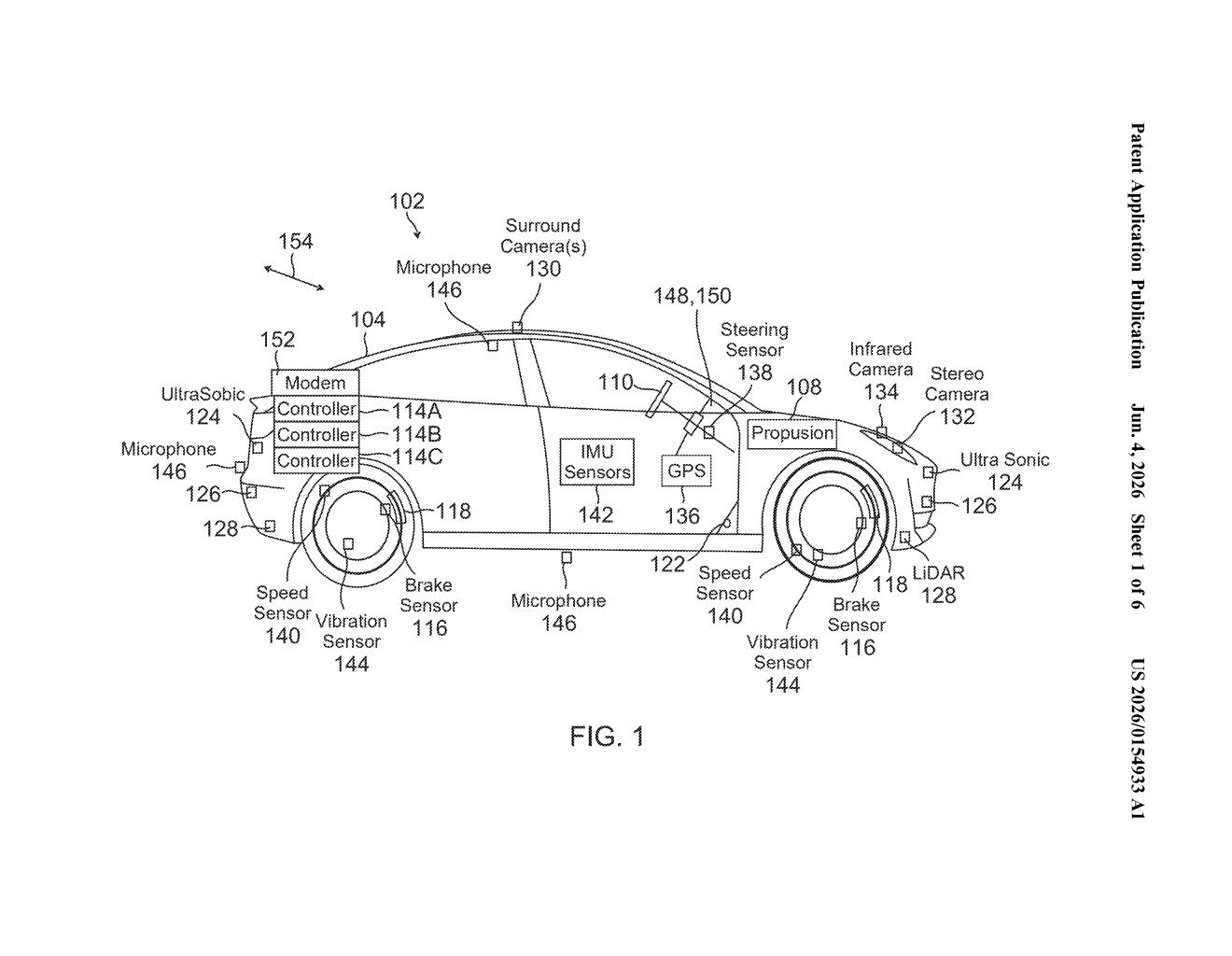
The patent describes a multi-stage perception pipeline designed to run on vehicle sensors (cameras, likely lidar too). Here's the sequence:
- Feature extraction: The system pulls feature maps from incoming image data — these are learned representations of edges, shapes, and textures at multiple scales.
- Upsampling: Those feature maps are increased in spatial resolution so fine-grained detail isn't lost when projecting to a different viewpoint.
- BEV projection: The upsampled maps are reprojected onto a Bird's Eye View (top-down 2D plane), which is the standard coordinate space for AV path planning and object tracking.
- Object proposals: The BEV feature maps feed a detector that generates candidate bounding boxes — raw guesses about where objects might be.
- Saliency maps: In parallel, the system generates one or more saliency maps (think: pixel-level attention scores indicating visually significant regions).
- Adaptive thresholding: Rather than applying one fixed confidence cutoff to all proposals, the system consults the saliency map to set location-specific thresholds — tighter where the scene is cluttered or unimportant, looser where attention is high.
The net result is a set of "refined" object detection proposals that have been filtered with context in mind, not just raw detection scores.
What this means for autonomous driving perception stacks
Autonomous driving perception systems live and die by their false positive and false negative rates. A fixed confidence threshold is a blunt instrument — tune it too high and you miss real obstacles; tune it too low and the system hallucinates hazards and brakes for nothing. Adaptive thresholding based on visual saliency is a more principled middle ground, and it's the kind of improvement that compounds: better proposals feed into better tracking, which feeds into better path planning.
For Qualcomm specifically, this fits neatly into its Snapdragon Ride automotive platform strategy. The company wants to be the silicon and software foundation for third-party AV stacks, and perception IP like this strengthens that pitch. If this technique reduces compute wasted on low-salience false detections, it also has efficiency implications for running on power-constrained automotive SoCs.
This is solid, incremental perception research — not a moonshot, but exactly the kind of careful engineering that separates production-ready AV systems from research demos. The saliency-guided adaptive threshold idea is well-motivated and addresses a real limitation in standard detection pipelines. Whether it's novel enough to survive a USPTO obviousness challenge is another question, but as a signal of where Qualcomm's automotive AI team is investing, it's worth tracking.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.