Zoox Patents a Simulation System That Teaches Robotaxis to Handle Red Lights
Running a red light is one of the most dangerous things a driver can do. Zoox is filing patents to make sure its self-driving cars never do it by accident, and never overcorrect into a paralyzed stop either.
How Zoox trains its cars to behave at traffic signals
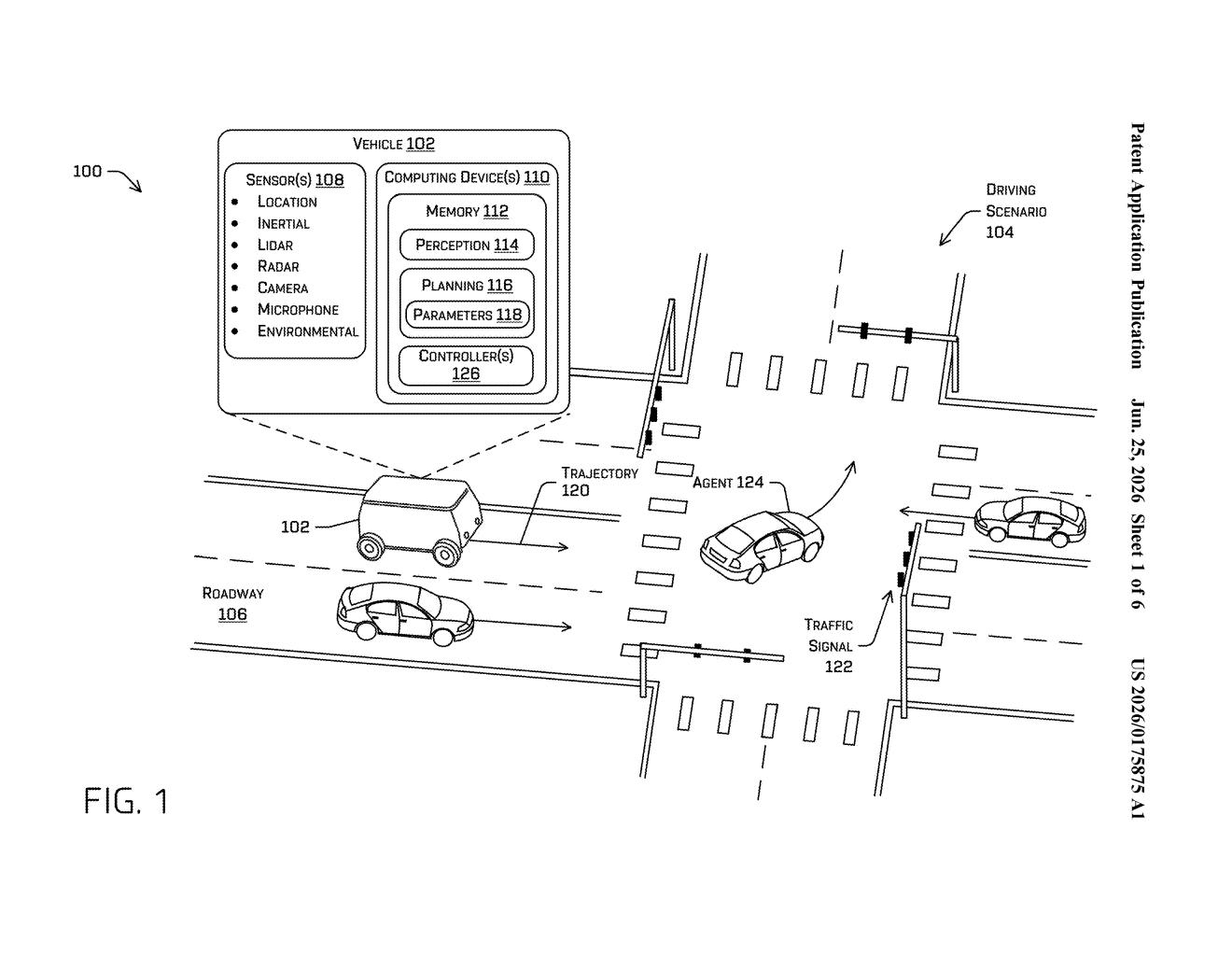
Imagine a self-driving car sitting at an intersection. It has to know not just that the light is red, but how urgently it needs to stop, how far back to brake, and when it's actually safe to proceed on green. Getting those judgment calls wrong, even slightly, makes a robotaxi either dangerously aggressive or frustratingly timid.
Zoox's patent describes a system that runs thousands of simulated drives through real recorded intersections, testing different settings for how the car weighs traffic signal rules. An algorithm then scores each set of settings and searches for the combination that produces the best driving behavior across all those test scenarios.
The winning settings get pushed out to actual vehicles on the road. It's essentially A/B testing for your self-driving car's personality at intersections, done entirely in a simulator before any real passengers are involved.
How the optimization loop tunes signal-crossing behavior
The patent centers on a parameter tuning system that works alongside the autonomous vehicle's existing planning software.
The planning component already knows how to calculate a trajectory cost (a score representing how risky or inefficient a given path is) for crossing an intersection when a light is red or in a transitional state. But the exact numbers that feed into that cost calculation, the parameters, need to be carefully calibrated. Too lenient and the car might creep through a stale yellow; too strict and it brakes so hard it becomes a rear-end hazard.
The tuning system works like this:
- It pulls in a training dataset of real-world intersection scenarios that have been recorded from previous drives.
- It runs a simulated vehicle through those scenarios using a candidate set of parameters, observing how the simulated car behaves at each signal.
- It scores the results using performance metrics (think: how often did the car stop appropriately, how smooth was the deceleration, did it hesitate when the light turned green).
- An optimization algorithm then searches the parameter space to find settings that score best across all scenarios.
The final, optimized parameters are transmitted directly to real vehicles in the fleet, updating how they handle traffic signals in live driving.
What this means for robotaxi safety and reliability
For any company running a commercial robotaxi service, intersection behavior is where the public's trust gets won or lost. A car that hesitates at a green light or drifts through a red is a headline waiting to happen. Zoox, which Amazon owns and which operates a fully enclosed pod-style vehicle with no steering wheel, has no human backup driver to catch mistakes.
This patent describes the kind of quiet, continuous improvement infrastructure that separates a well-tuned fleet from a brittle one. By optimizing in simulation against real recorded scenarios before pushing any change to physical cars, Zoox can iterate on its vehicles' intersection behavior without putting test rides at risk. For riders, that translates to a car that feels confident, not hesitant, at every stoplight.
This is solid, unglamorous infrastructure work. It won't make headlines the way a new sensor package would, but a simulation-driven parameter tuning loop is exactly the kind of tooling a serious autonomous vehicle company needs to run a reliable fleet at scale. The fact that Zoox is patenting the specific architecture suggests it considers this a meaningful competitive differentiator, not just boilerplate engineering.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.