Waymo Patents a Multi-Camera System for Reading Vehicle Lights in Real Time
A self-driving car that can't reliably tell whether the vehicle ahead is braking — or just has a dirty taillight — isn't safe. Waymo's latest patent tackles exactly that problem with a two-camera fusion approach.
What Waymo's light-reading system actually does
Imagine you're following a car at dusk. The brake lights flicker, and you're not sure if it's actually slowing down or just a reflection. You piece together context clues — speed, distance, the car ahead of the car. That kind of nuanced reading is surprisingly hard for autonomous vehicles.
Waymo's patent describes a system that feeds footage from two different cameras — one high-resolution, one high-frame-rate — into a neural network that jointly interprets what it sees. By combining the strengths of both feeds, the system builds a more confident read on whether a light is on, off, blinking, or somewhere in between.
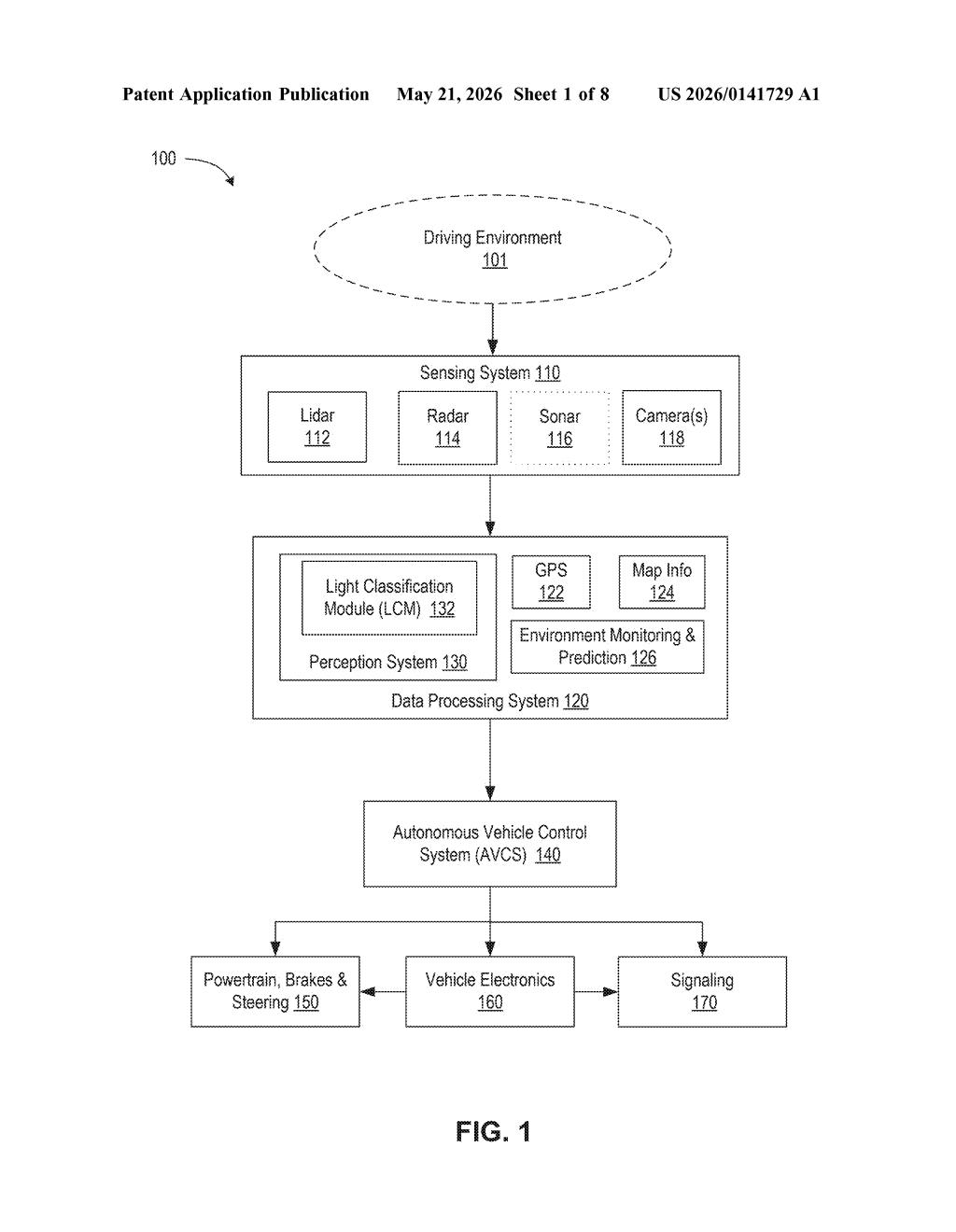
Once the system decides what a light is doing, it hands that decision to the AV's control system, which can then slow down, hold position, or adjust the planned route. It's a targeted fix for one of the trickiest parts of urban driving: knowing what the cars around you are about to do.
How two mismatched cameras train one neural network
The core claim is a method for vehicle light classification using two cameras that are deliberately different from each other — one optimized for resolution, the other for image acquisition rate (i.e., frame rate, how many images it captures per second).
Instead of processing each camera feed separately and then merging conclusions, the patent describes jointly processing both sets of image frames through one or more neural networks simultaneously. That joint approach lets the model use high-res detail from one feed and rapid temporal sampling from the other in a single inference pass — rather than reconciling two independent outputs.
The output is a classification of light state: think brake light on/off, turn signal blinking left or right, hazard lights active, reverse light engaged. The patent describes identifying the target vehicle in the scene first, then running the classification.
- Camera 1: High-resolution — good at reading light shape, color, and position.
- Camera 2: High frame rate — good at detecting blinks and flicker patterns.
- Neural network fusion: Both feeds processed together to reach a single confident classification.
- AV control system: Receives the classification and adjusts the vehicle's travel path accordingly.
The original application was filed in November 2021 (application No. 17/531,230); this January 2026 publication is a continuation.
Why light classification is a hard problem for robotaxis
Light classification sounds mundane until you consider how much driving behavior is encoded in lights. A brake light tells you to slow down. A left-turn signal at an intersection tells you the car is about to cut across your path. A construction vehicle with hazards on is probably moving at 5 mph. For a robotaxi operating at scale in dense urban environments, misreading any of these can mean an unnecessary hard stop — or worse.
The multi-camera fusion angle is meaningful here. A single high-resolution camera can struggle with fast blink rates; a single high-frame-rate camera may lack the pixel density to distinguish a dim brake light from ambient reflections. Fusing both in one network pass is a practical engineering answer to a real sensor trade-off, and it's the kind of detail that separates production AV perception stacks from research demos.
This is unglamorous but important infrastructure work — the kind of patent that doesn't make headlines but quietly underpins everything else Waymo's system does. Getting light classification right at scale, across lighting conditions, camera ages, and vehicle types, is genuinely hard. The two-camera fusion approach is a credible engineering bet, not a publicity filing.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.