Nvidia Patents a High-Speed Data Network for Streaming Camera Feeds in Self-Driving Cars
Getting a camera image from point A to point B inside a self-driving car sounds trivial — until a packet goes missing and the car is suddenly making decisions on an incomplete picture. Nvidia's new patent tackles exactly that problem.
How Nvidia moves camera frames inside autonomous vehicles
Imagine a self-driving car with dozens of cameras feeding a constant stream of images to a central computer. All that visual data has to travel somewhere inside the vehicle, and Nvidia's patent describes a method for sending those images over Ethernet — the same networking technology used in offices and homes — rather than custom wiring.
The clever part is what happens when a piece of an image gets lost in transit. Each chunk of an image is tagged with two pieces of information: a sequence number (so the system knows the order) and a byte offset (so it knows exactly where in the final image that chunk belongs). If a chunk goes missing, the hardware can detect the gap immediately by noticing that the sequence numbers don't add up.
This lets the system flag incomplete frames fast, without waiting to reconstruct the full image first. For a car traveling at highway speed, catching a corrupted frame quickly isn't just a nice-to-have — it's a safety requirement.
How the packet headers track lost image chunks
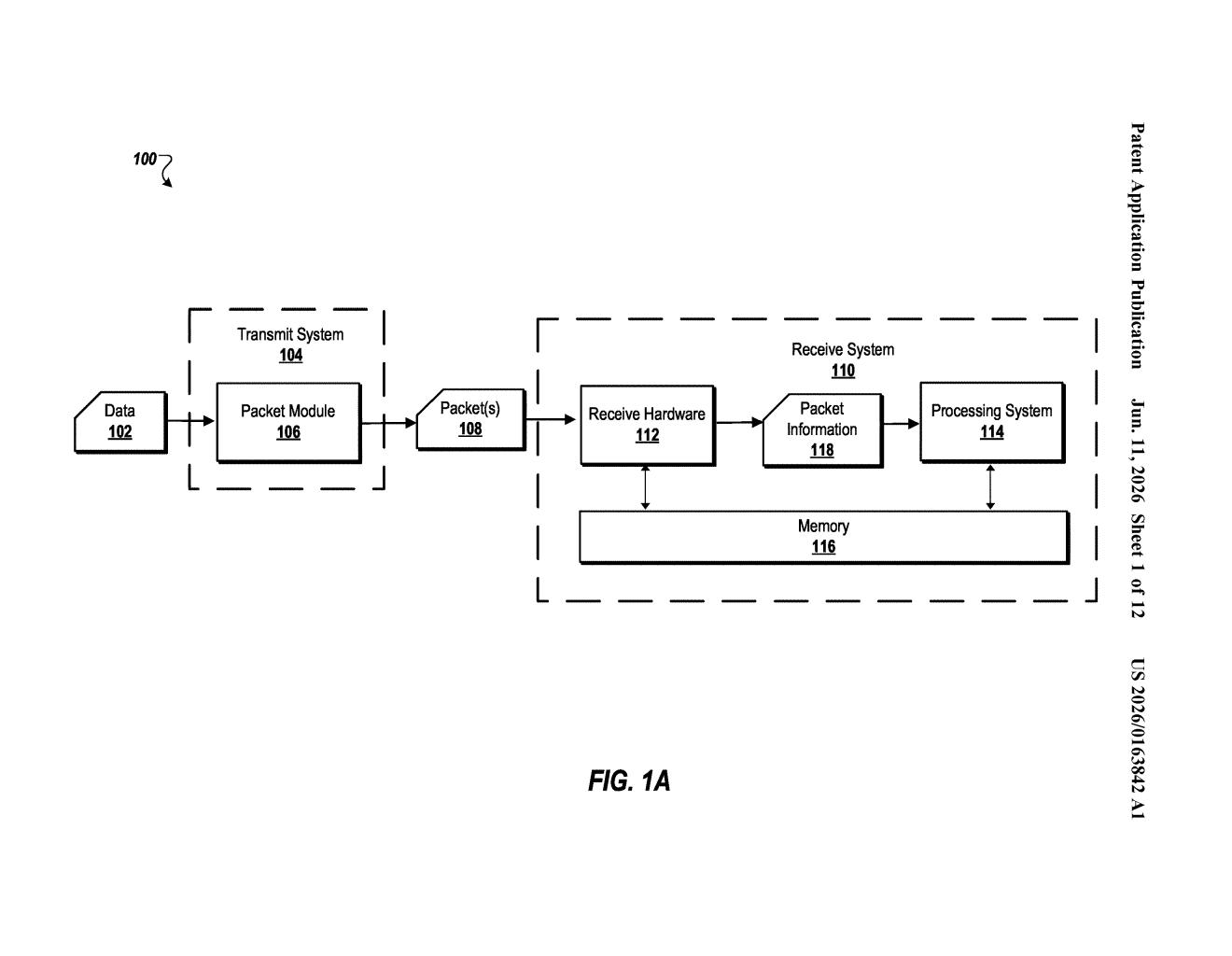
The patent describes a hardware-and-software pipeline for transporting image frames across an Ethernet network inside an autonomous or semi-autonomous vehicle.
Each image frame is sliced into segments, and every segment is wrapped in an Ethernet packet that carries two key metadata fields in its header:
- Sequence number — the position of this segment within the ordered sequence of the full frame
- Byte offset — the exact memory address where this segment should land when the frame is reassembled
Dedicated hardware logic monitors incoming packets in real time, comparing consecutive sequence numbers to detect gaps. If segment 47 arrives after segment 45 with no segment 46 in between, the system immediately knows a packet was lost — no need to wait for a timeout or for the full frame to fail to reconstruct.
Meanwhile, a processing system uses the byte offset values to write each arriving segment directly to the correct location in memory. This means segments can arrive out of order and still land in the right place, reducing the need for a separate reordering step before the image can be used by the vehicle's perception software.
What this means for self-driving car reliability
Self-driving systems live or die on the freshness and completeness of their sensor data. Using standard Ethernet to carry camera data is attractive because Ethernet hardware is cheap, fast, and ubiquitous — but standard Ethernet doesn't guarantee delivery, which is a real problem when you're stitching together a real-time view of the road.
Nvidia's approach embeds loss detection directly into the packet format rather than relying on higher-level software retries, which would be too slow for real-time driving applications. If your future vehicle uses this system, the car's computer would know within microseconds that a camera frame is corrupted and could act on that — whether by using the previous frame, alerting redundant sensors, or flagging a fault. That kind of low-level reliability engineering is exactly what separates prototype autonomy demos from production-ready systems.
This is unglamorous infrastructure work, but it's the kind of patent that actually matters in production autonomous vehicles. Reliable, low-latency image transport is a genuine unsolved problem at scale, and embedding packet-loss detection into the hardware layer rather than software is a real engineering choice worth noting. Nvidia's DRIVE platform ambitions make this a coherent filing, not a defensive placeholder.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.