Waymo Patents a System That Predicts Crashes Between Other Vehicles
Most self-driving safety systems ask 'will I crash into something?' Waymo's new patent asks a harder question: 'are two other things about to crash into each other — and should I get out of the way?'
How Waymo's AV spots crashes it isn't part of
Imagine you're driving and you notice a car running a red light on a cross street while a truck is barreling through the intersection. You don't need to be in the collision to realize you should slow down and give the wreck some room. Waymo's patent builds that exact instinct into its autonomous vehicles.
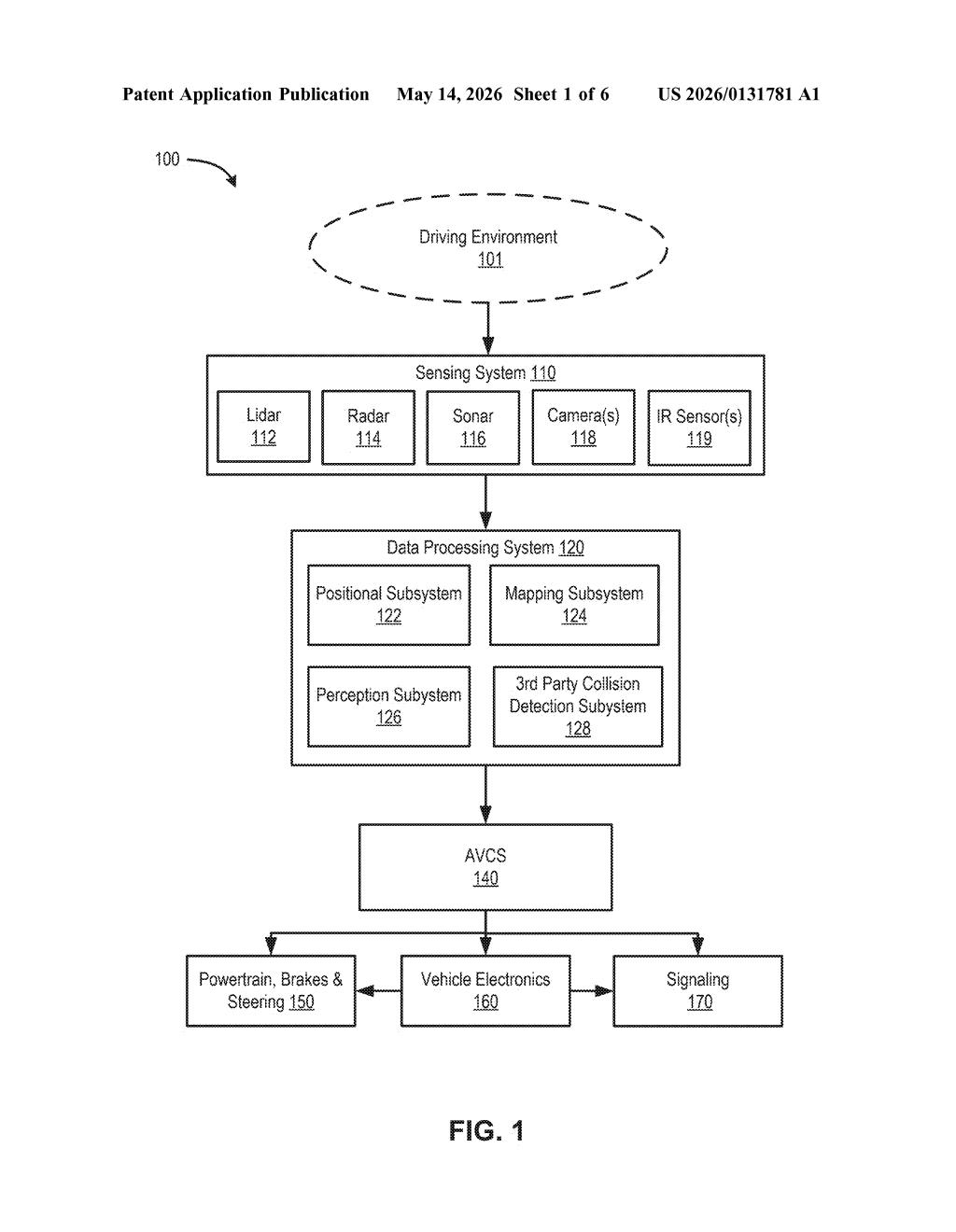
The system tracks every object in the car's environment — other cars, cyclists, pedestrians — and predicts where each one is headed. It then asks: do any of those predicted paths overlap in a way that suggests a collision is about to happen between them?
If the answer is yes, the Waymo vehicle doesn't just freeze — it actively steers away from the area where the crash is predicted to occur. The idea is that third-party crashes are just as dangerous as direct threats, and an AV that can anticipate them can respond faster and more intelligently than one that only reacts after impact.
How shape projections flag third-party overlap
The patent describes a pipeline that runs continuously as the AV moves through its environment. Here's the core flow:
- Object detection: The system collects "object indications" for every tracked object nearby — each one includes a shape definition (basically a bounding box or polygon representing the object's physical footprint) and one or more predicted future locations (where the object is expected to be at future time steps, based on its trajectory).
- Shape projection: For each object, the system "projects" its shape definition forward onto each predicted future location — essentially sliding the object's footprint along its predicted path, like stamping its outline at every future point in time.
- Overlap detection: The system then checks whether any two projected shape definitions overlap. Overlap means the two objects are predicted to occupy the same space at roughly the same time — a classic collision signature.
- AV response: If the overlap meets a configurable collision criterion (a threshold for how much overlap, or how confident the prediction is), the AV modifies its own operation to avoid the area where those two objects are predicted to collide.
The computational efficiency angle is notable: rather than running full physics simulations, this approach uses relatively cheap geometric overlap tests on projected shapes — keeping the compute cost low while still capturing meaningful collision risk.
What third-party collision prediction means for AV safety
Self-driving systems have historically been optimized to avoid hitting things themselves. But real-world driving requires anticipating chaos you're not directly involved in — a rear-end pileup ahead, a cyclist swerving into a car door, a skidding truck. Waymo's approach essentially adds a "bystander awareness" layer to the vehicle's decision-making, which could meaningfully reduce the chance of an AV getting caught in a secondary collision.
For you as a passenger, this could translate to smoother, more human-like defensive driving — the kind where the car eases off the gas well before anything bad actually happens. It also signals that Waymo is pushing the sophistication of its scene understanding beyond ego-centric collision avoidance into something closer to full situational awareness.
This is genuinely interesting work. Third-party collision prediction is a real gap in how most AV safety stacks are described publicly, and the shape-projection approach is elegant in its simplicity — it sidesteps expensive simulation by reducing the problem to geometric overlap. It's not flashy, but it addresses a class of real-world scenarios that can cause serious accidents even when the AV itself does everything right.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.