IBM Patents a LiDAR Marker System That Gives Robots Invisible Safety Fences
What if a warehouse robot could instantly know it should never cross a certain zone — not because a human programmed a GPS boundary, but because it literally spotted a physical marker and generated its own invisible fence? That's what IBM is patenting here.
How IBM's robots read physical markers to dodge obstacles
Imagine a busy warehouse where a forklift is parked near a fragile pallet. You want the autonomous robot rolling around nearby to give it a wide berth — but programming exact no-go zones for every possible scenario is a nightmare. IBM's patent describes a smarter approach: attach a small physical device to whatever object needs a safety zone, and let the robot figure out the rest.
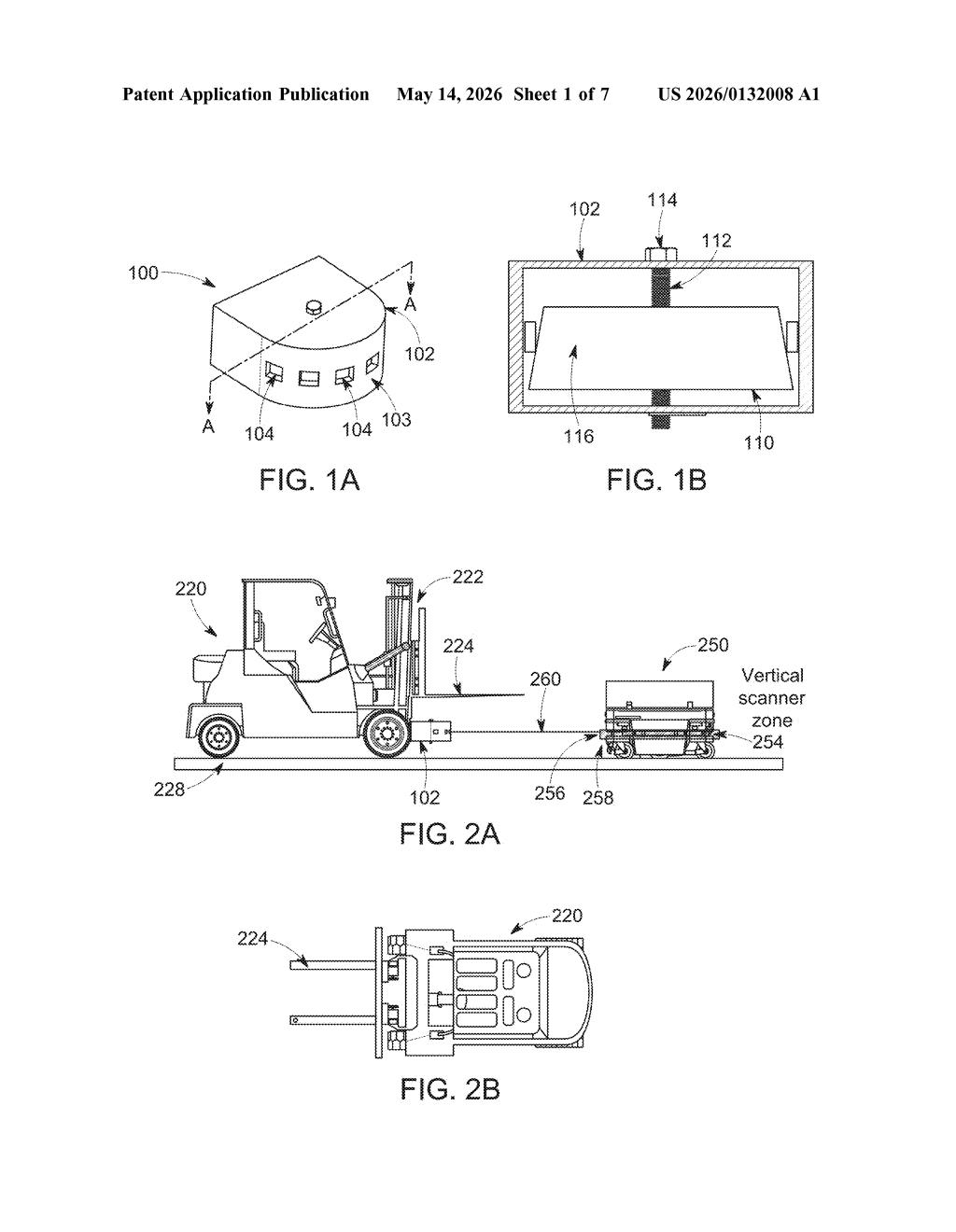
The device has two specific surfaces that together create a recognizable pattern when hit by the robot's LiDAR laser. Once the robot's software identifies that pattern, it automatically generates an artificial buffer — essentially an invisible force field — around the object and steers clear.
You're not drawing boundaries on a map in advance. Instead, the boundary travels with the object, wherever it goes. Move the pallet, move the marker, and the robot's no-go zone moves too.
How the dual-surface pattern triggers an artificial buffer
The system relies on a two-part interaction between a physical marker and the robot's onboard LiDAR sensors.
Step by step:
- A physical device (the marker) is attached to an object — like a piece of equipment, a fragile load, or a restricted zone boundary.
- The device is designed with two distinct surfaces. When the AMR's LiDAR scanner sweeps across them, those surfaces create a unique geometric pattern in the sensor data.
- The robot's onboard computer runs a pattern recognition program that watches for that specific LiDAR signature in real time.
- When the pattern is detected, the system automatically translates it into a boundary message — essentially a set of instructions that spawn an artificial buffer around the marked object.
- The robot then routes itself to avoid that buffer for as long as the pattern remains visible to its sensors.
The key insight is that the boundary isn't pre-mapped into any navigation system. It's generated on the fly based on what the robot sees at that moment. This makes it inherently portable — wherever the marked object goes, the safety zone follows.
What this means for warehouse robot safety floors
Autonomous mobile robots in warehouses, factories, and hospitals typically rely on pre-mapped floor plans or fixed beacon networks to know where they can and can't go. Those systems break down the moment the environment changes — a new rack, a temporarily parked cart, a blocked aisle. IBM's approach offloads that boundary intelligence to the object itself, making the system much more dynamic.
For fleet operators, this could reduce the overhead of constantly updating navigation maps. For safety engineers, it means you could protect an ad-hoc hazard zone — say, a spill cleanup area — simply by placing a marked device nearby, without touching any software configuration.
This is a genuinely practical idea for real-world robotics deployments, where environments change faster than maps get updated. It's not a moonshot — it's the kind of unglamorous infrastructure thinking that actually makes AMR fleets usable outside of perfectly controlled test environments. IBM doesn't have a dominant consumer robotics brand, but this kind of IP positions them well as a B2B solutions player in industrial automation.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.