Waymo Patents a System That Predicts When Cyclists Are About to Lose Control
Most self-driving safety systems react to people who are already in the road. Waymo's new patent is about something harder: predicting that a cyclist or pedestrian is *about* to lose control — and reacting before they hit the ground.
What Waymo's loss-of-control detection actually does
Imagine a cyclist ahead of your car suddenly wobbles, clips a curb, and goes down. By the time a human driver processes what happened, it may be too late to stop. Waymo is working on a system that watches for exactly that kind of loss-of-control moment — not after the fall, but as it's starting.
The idea is to track key points on a person's body — think shoulders, hips, head — and watch how their height changes relative to each other over time. A pedestrian stumbling, a cyclist tipping sideways, or a scooter rider going down all create a distinctive pattern in those height readings. When the system detects that pattern, it flags the person as a loss-of-control risk and tells the car to steer clear or slow down.
The system also uses a separate machine learning model to assign a "prone state score" — essentially a probability that someone is in the process of falling flat. That score feeds into the same decision to trigger an avoidance action. It's a two-pronged approach: track the geometry of the body, and separately estimate whether a fall is in progress.
How the system tracks body height to predict a fall
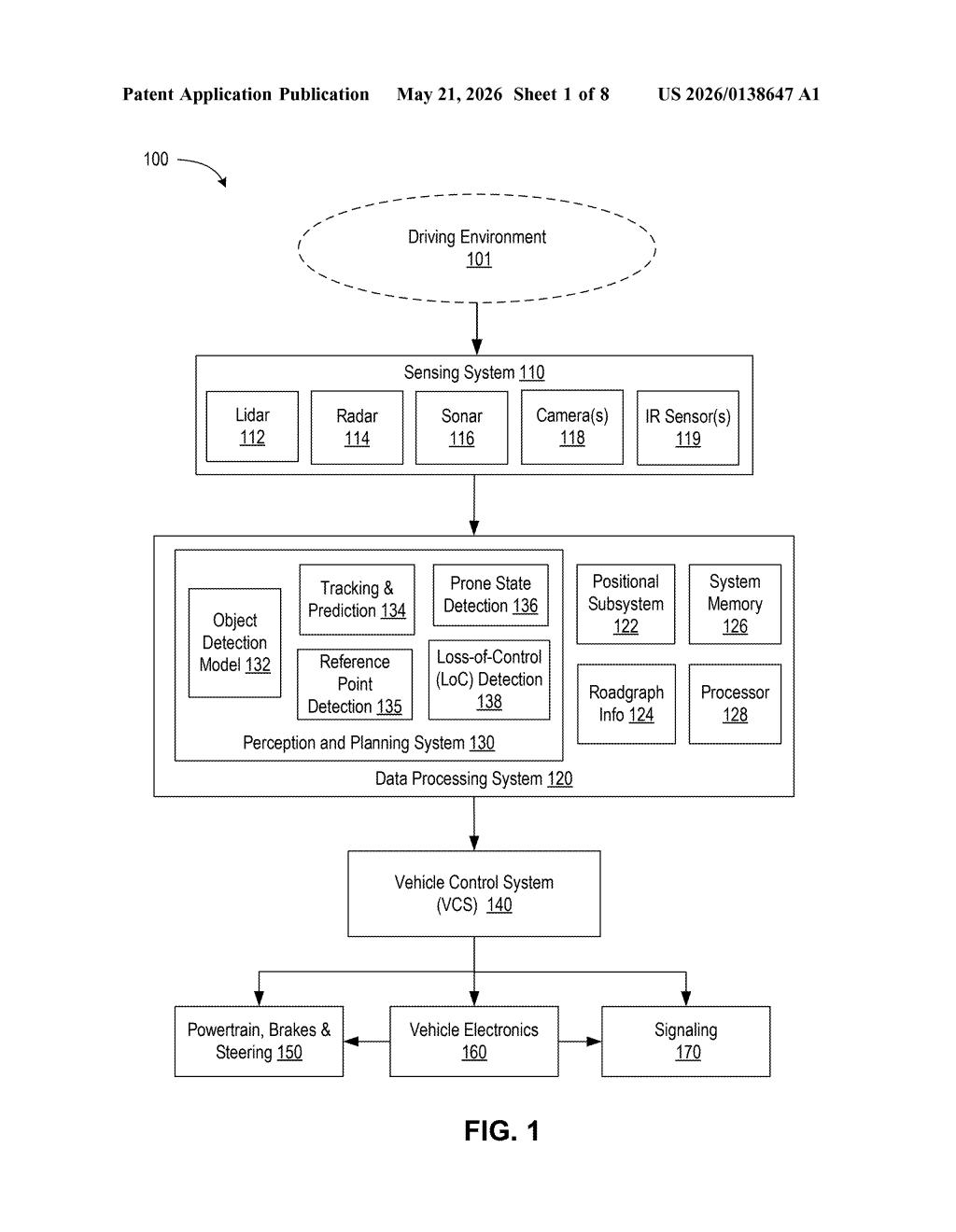
The patent describes a perception pipeline built into Waymo's autonomous vehicle stack that specifically targets vulnerable road users (VRUs) — pedestrians, cyclists, scooter riders, and similar — who are in danger of losing control of their movement.
Here's how the pipeline works:
- The vehicle's sensing system (likely LiDAR, cameras, or a combination) collects environmental data continuously.
- One or more machine learning models process that data to identify a set of reference points on a VRU's body — think of these as a simplified skeleton or keypoint map.
- The system calculates height differentials between those reference points — the vertical distance between, say, a person's head and their center of mass — and tracks how those differentials change over time.
- A separate ML model outputs a prone state score (a confidence estimate that the person is falling or has fallen horizontal), which can be combined with the height-differential signal.
If the system determines that the height changes and/or prone state score indicate a loss-of-control risk, it sends a command to the vehicle's control system to perform an avoidance action — slowing, steering, or stopping. The claim is deliberately broad about what sensing modality is used, making it applicable to LiDAR point clouds, camera frames, or fused sensor inputs.
Why catching a fall before it happens changes AV safety
Most AV perception systems are optimized to track where people are and predict where they're going based on their current trajectory. A person who's upright and walking is easy to model. A person who's suddenly collapsing or flying off a bike is much harder — their trajectory becomes chaotic and unpredictable in a fraction of a second. Catching that transition early is the whole point of this patent.
For Waymo's robotaxi operations in dense urban environments, this is a genuinely practical problem. Cities have cyclists, e-scooters, and pedestrians on uneven terrain. If your AV can detect a wobbling cyclist before they hit the ground, you've bought yourself an extra second or two of reaction time — which at low speeds is often the difference between a near-miss and a collision. This kind of proactive safety logic is what separates a well-tuned AV from a system that merely reacts to obstacles.
This is a specific, technically grounded safety patent that addresses a real gap in AV perception — and it's the kind of work that doesn't get headlines but absolutely matters for real-world deployment. Detecting a falling cyclist before the fall completes is a harder computer vision problem than it sounds, and the height-differential approach is an elegant way to catch it without needing to perfectly classify every edge-case body position. Worth watching.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.