Navigation AI Learns When and How to Speak Up While Driving
Google is building a navigation assistant that doesn't just tell you where to turn — it figures out the best moment to tell you, based on how noisy, distracting, or stressful your driving environment is right now.
What Google's adaptive navigation voice actually does
Imagine you're merging onto a busy freeway while your kids argue in the back seat. A standard navigation app says "Turn right in 500 feet" at the exact same moment it would if you were calmly cruising down an empty road at noon. That's the problem Google wants to fix.
Google's patent describes a navigation system that reads the conditions around you — think road noise, speed, traffic density, time of day — and decides when and how to give you a direction. If your environment suggests you might be overwhelmed, the system could remind you earlier, repeat itself, or speak more clearly. If you're in a quiet stretch of highway, it might give you a single, simple prompt.
The key ingredient is that the system learns from real drivers. It trains on data showing when drivers actually made the right turn after a prompt — and when they missed it. Over time, it figures out which combinations of environment and timing work best, then applies those lessons to your drive in real time.
How the model learns from millions of past wrong turns
Google's system trains a machine learning model (a pattern-recognition algorithm) on a large dataset of past navigation events. Each event includes three things: the sensor readings from the car or phone at the time a direction was given, what the direction actually said, and whether the driver correctly followed it.
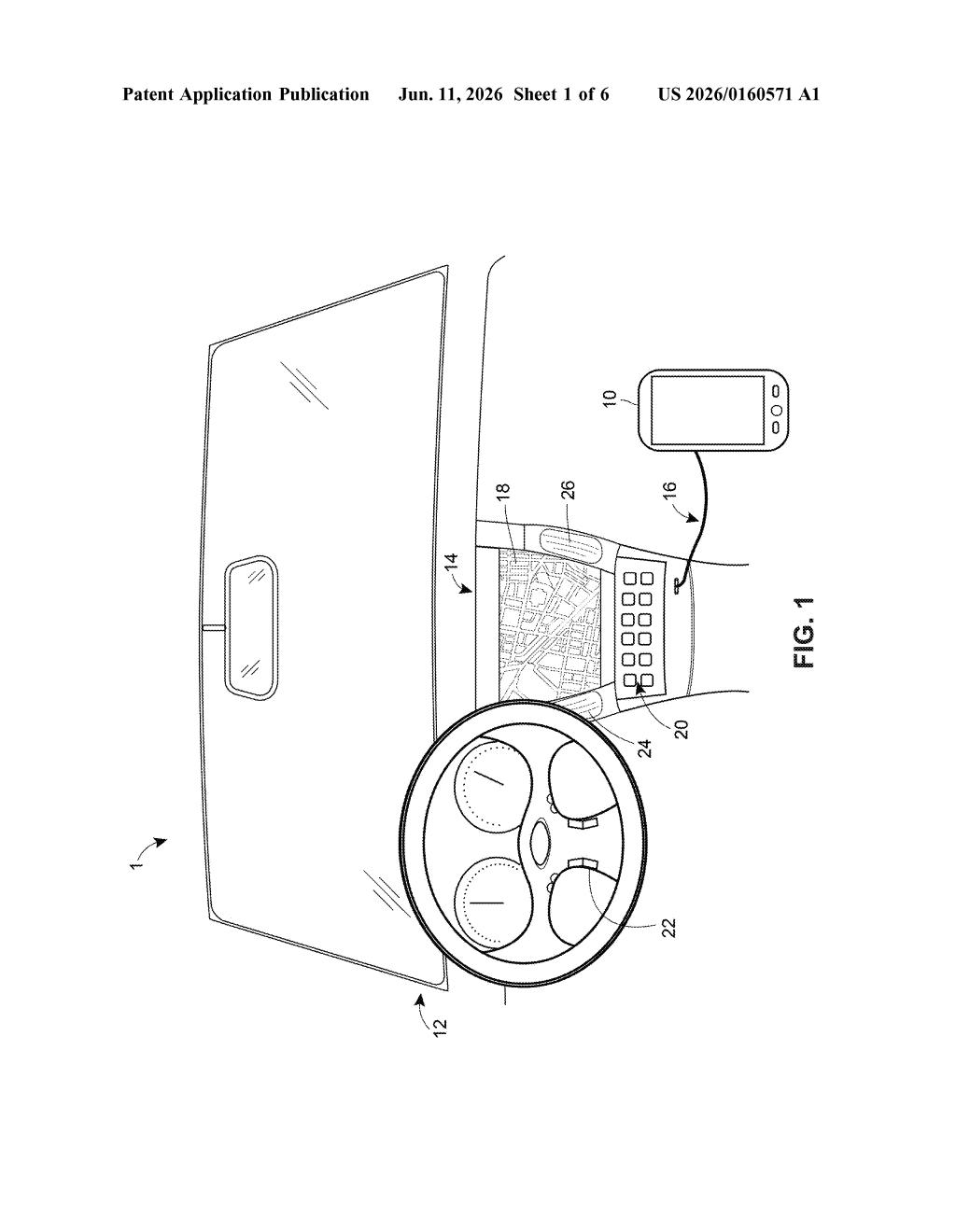
The sensors involved can include things like microphone readings (ambient noise level), accelerometer data (how hard you're braking or turning), GPS speed, and potentially camera or proximity inputs — collectively describing the context of the drive at that exact moment.
Once trained, the model handles new navigation requests in real time. When your phone asks for directions, the server:
- Pulls live sensor data from your device
- Feeds that data plus the upcoming navigation instruction into the model
- Gets back a recommended set of audio instruction parameters — most importantly, the timing: how far in advance to warn you, whether to repeat the instruction, and at what intervals
So instead of a fixed "warn at 500 feet" rule baked into the app, the system picks a timing that the data says actually works for a driver in your current situation. The whole process happens on Google's servers and pushes the adapted instruction to your device on the fly.
What this means for distracted-driver safety and Google Maps
For everyday drivers, this could mean fewer missed exits and less frustration with navigation apps that feel tone-deaf to what's happening around you. If the system works as described, Google Maps could get noticeably better at knowing when not to stay quiet and when a single early warning is enough.
From a safety angle, this is meaningful: missed navigation prompts often trigger last-second lane changes or sudden stops. A system that anticipates driver attention levels — rather than broadcasting on a fixed schedule — could reduce those moments. It also positions Google to differentiate its navigation stack from Apple Maps and dedicated GPS devices, which still largely use static timing rules.
This is a genuinely useful idea, and it's the kind of incremental-but-impactful improvement that navigation has needed for years. The hard part isn't the concept — it's whether Google has enough correctly-labeled real-world data to train a model that generalizes across the huge variety of driving situations, vehicle types, and driver habits it'll encounter. If the training data is good, this ships quietly inside Google Maps and most users never notice it — they just stop missing turns.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.