Nvidia Patents Technology That Matches What Multiple Cameras See of the Same Scene
When dozens of cameras watch the same scene from different angles, getting them all to agree on where something is turns out to be surprisingly hard. Nvidia's latest patent describes a landmark-based tool that lets operators visually confirm — and correct — that calibration without specialized software.
What Nvidia's cross-camera calibration system actually does
Imagine a parking garage watched by four security cameras, each mounted at a different corner. If someone walks through a restricted zone, you'd want every camera's software to agree on exactly where that person is. But cameras mounted at different heights and angles naturally see the world differently — and getting them to share a common map of the space is a genuine headache.
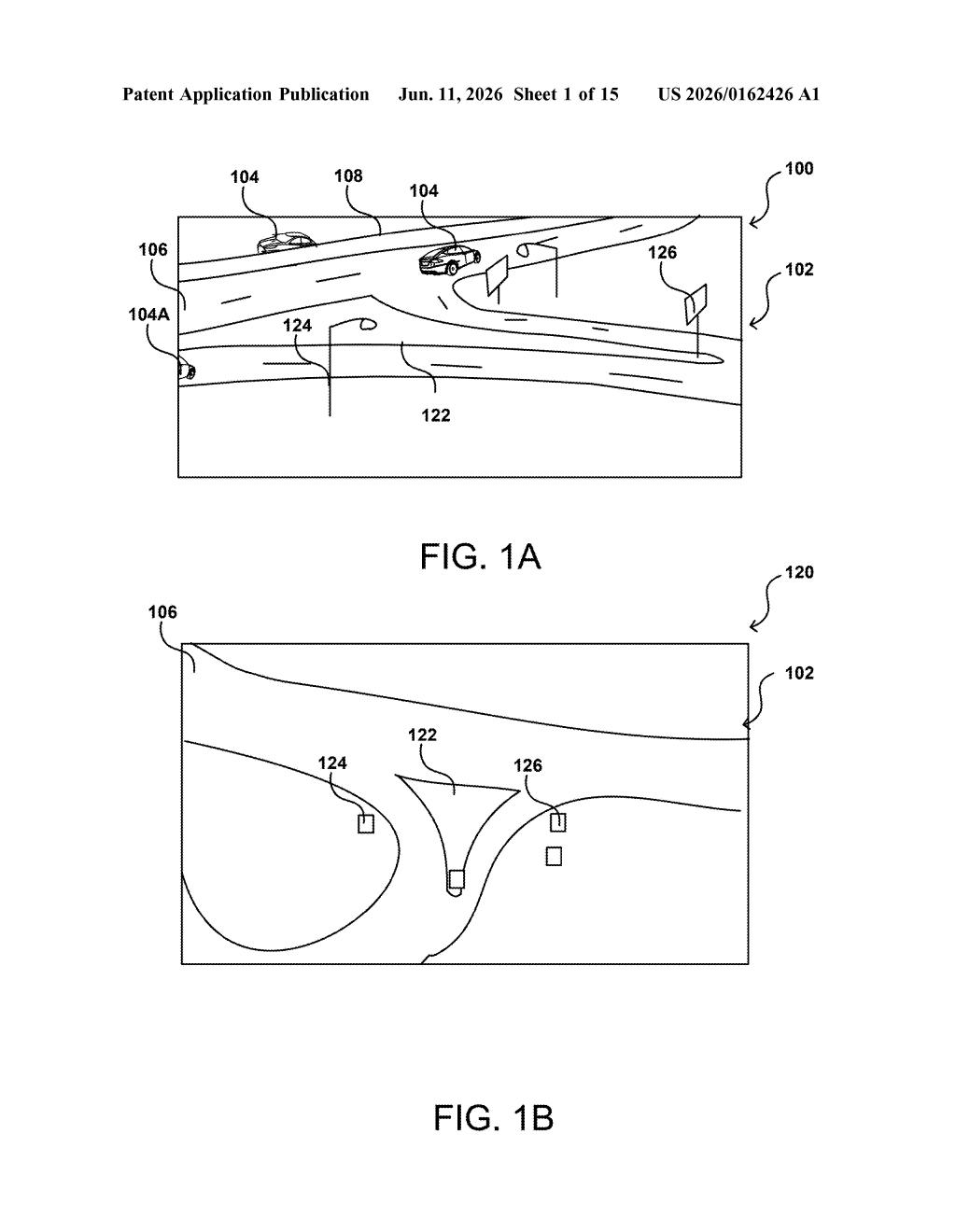
Nvidia's patent describes a method where a human operator draws a shape (like a box or polygon) around an area of interest in one camera's view, marks a few recognizable reference points — landmarks — and the system automatically figures out where that same area appears in a different camera's image. The result gets overlaid on the second image so you can see at a glance whether the two cameras are properly aligned.
This is essentially a visual sanity-check tool for multi-camera setups. Instead of feeding raw numbers into specialized calibration software and hoping for the best, you get a live preview of whether your cameras are actually seeing the same slice of the world.
How landmarks translate a region across camera perspectives
The patent covers a computer-implemented calibration workflow that works across cameras with different positions and orientations — what engineers call different extrinsic parameters (where a camera sits in 3D space) and intrinsic parameters (lens properties like focal length and distortion).
Here's the basic flow:
- A first image from Camera A and a second image from Camera B are both displayed to a user.
- The user clicks several landmarks — recognizable, fixed points visible in Camera A's image — and connects them into a polygon (a drawn region of interest).
- The system uses those landmark coordinates, plus what it knows about each camera's geometry, to mathematically translate that polygon into the equivalent region as it would appear in Camera B's image.
- The translated polygon is then overlaid on Camera B's view, giving a visual confirmation of how well the two cameras are calibrated against each other.
A key problem the patent calls out is that standard image files — like JPEGs — carry no depth information (they can't tell you how far away something is). By anchoring the translation to manually identified landmarks rather than relying on depth data, the system sidesteps that limitation entirely.
The approach is designed to work with the kinds of sensor arrays found in large-scale deployments: think multi-camera traffic monitoring, warehouse automation, or vehicle perception systems.
What this means for self-driving and multi-camera AI systems
Multi-camera systems are at the core of almost everything Nvidia sells into — autonomous vehicles, robotics, smart infrastructure, and AI-powered video analytics. Miscalibrated cameras are a quiet but serious failure mode: if two cameras disagree about where an object is by even a small margin, the AI layer built on top of them can make bad decisions. A visual, landmark-driven verification step that any operator can run — rather than a specialist running cryptic calibration scripts — meaningfully lowers that risk.
For Nvidia's Metropolis platform (its AI-powered video analytics ecosystem) and its autonomous vehicle work through DRIVE, this kind of tooling is the unglamorous infrastructure that has to work before the flashy AI features can be trusted. If this ships into a product, it's the kind of thing you'd never notice — until you notice that the system just works.
This is infrastructure work, not a headline feature — but it's the kind of infrastructure that determines whether a multi-camera AI deployment is actually reliable or just looks good in a demo. The landmark-and-polygon approach is straightforward and practical, and the explicit focus on image files that lack depth data suggests Nvidia is targeting real-world deployments where you can't always control sensor quality. Worth watching if you follow Nvidia's Metropolis or DRIVE platforms.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.