Geometric Fabrics Enable Smarter Robot Grasping
Getting a robot to reliably pick up a real object — without fumbling, crashing into it, or giving up — is one of the hardest unsolved problems in robotics. Nvidia's latest patent filing lays out a training pipeline that may make it a lot more tractable.
How Nvidia trains robots to pick things up from images
Imagine trying to teach someone to juggle, but only in their head first, then with their eyes half-closed, then finally with real oranges. That's roughly the approach Nvidia is patenting for robot arms.
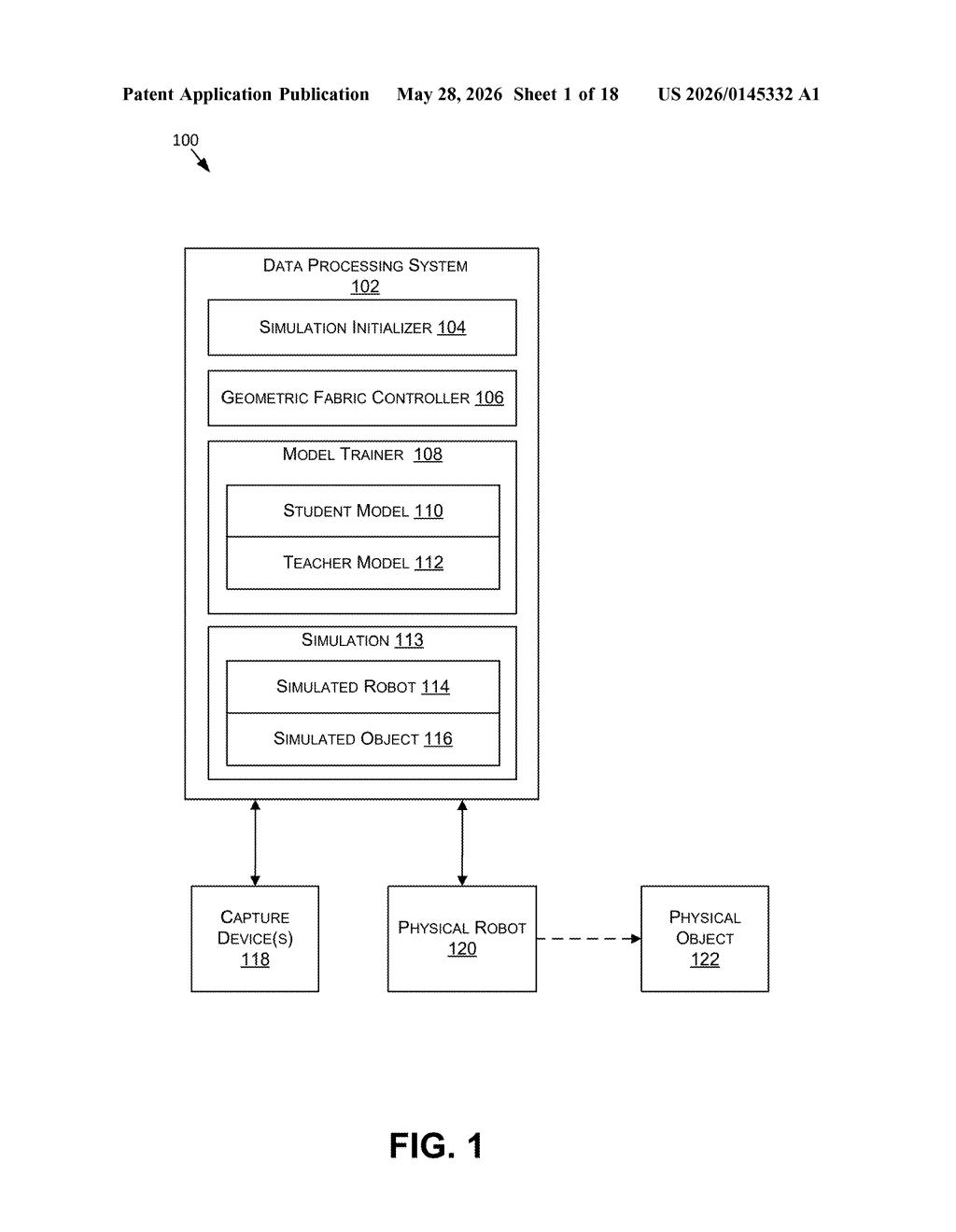
The system trains a robot in two stages inside a simulator. First, a "teacher" AI learns to control the arm using perfect, detailed information about the virtual world — it knows exactly where every finger and object is. Then a "student" AI learns to do the same job using only camera images and slightly scrambled sensor data, mimicking the messiness of the real world.
Once the student is trained, it gets deployed on a physical robot arm, controlling it based purely on what the robot's camera sees. The trick that holds this all together is something called a geometric fabric — a mathematical layer that keeps the robot's motions smooth and collision-safe, almost like guardrails built into the physics of the movement itself.
How the teacher-student pipeline drives the robot arm
The patent describes a three-step control architecture centered on a technique called geometric fabrics — a framework (borrowed from Riemannian geometry) that shapes how a robot moves through space by encoding things like "don't crash into yourself" and "approach objects smoothly" directly into the motion equations, rather than leaving them as soft suggestions for a neural network to maybe respect.
On top of that fabric, Nvidia layers a teacher-student distillation loop:
- Stage 1 (Teacher): A privileged policy — meaning it has access to full simulation state data like exact joint positions, object poses, and contact forces — learns to generate actions that feed into the geometric fabric. Think of this as an expert tutor who can see through walls.
- Stage 2 (Student): A second model is trained to match the teacher's outputs, but using only rendered camera images and noised state information (deliberately corrupted sensor readings). This forces the student to be robust to the kind of perceptual noise real hardware constantly produces.
- Deployment: The student model, paired with the geometric fabric, drives a physical robot arm based on live camera input — no perfect state information required.
The noising step is particularly important. By training the student on degraded inputs, Nvidia is essentially stress-testing it against sim-to-real gap — the well-known problem where robots trained in simulation fall apart when exposed to the physical world's imperfections.
What this means for physical AI and humanoid robots
The sim-to-real gap is the central headache of modern robotics. You can train a policy for millions of hours in simulation for almost nothing, but the moment it hits a real robot in a real room, small sensor errors and lighting differences cause it to fail. The teacher-student-plus-noise approach in this patent is a direct attack on that problem.
Nvidia has been publicly building out its Isaac robotics platform and positioning itself as the compute backbone for humanoid and industrial robots. A patent like this — combining geometric motion safety with vision-based control — fits squarely into that strategy. For anyone building or buying warehouse robots or robotic manipulation arms, this kind of training pipeline is the kind of infrastructure work that quietly makes everything else more reliable.
This is genuinely interesting work, not just incremental patent filing. The combination of geometric fabrics (which enforce physical safety at a mathematical level) with vision-based student distillation is a thoughtful answer to real deployment problems in robotics. It won't make headlines the way a humanoid demo does, but it's the kind of foundational method that actually makes dexterous robots ship.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.