Nvidia Patents a Road Separation Detection System for Self-Driving Cars
Self-driving cars need to know whether a concrete barrier divides opposing traffic or just marks a shoulder — and getting that wrong has serious consequences. Nvidia's new patent describes a system that figures it out by cross-referencing physical barriers with road markings in real time.
What Nvidia's road separation detector actually does
Imagine you're driving on a two-lane rural road and a concrete divider suddenly appears down the middle. Is that barrier splitting oncoming traffic from your lane, or is it just a decorative median? You know instantly — but a self-driving car has to figure that out from sensor data alone.
Nvidia's patent describes a system that does exactly this. It looks at barriers detected by the car's sensors and then checks nearby road markings — like lane lines and arrows — to decide whether that barrier represents a true road separation between opposing directions of travel, or something else entirely.
Why does it matter? Whether a road is divided or undivided changes everything about how an autonomous vehicle should behave: how fast it drives, when it can pass, and how it reacts to vehicles that appear to be heading toward it. Getting this classification right is a foundational safety decision.
How barriers and lane markings get fused into a decision
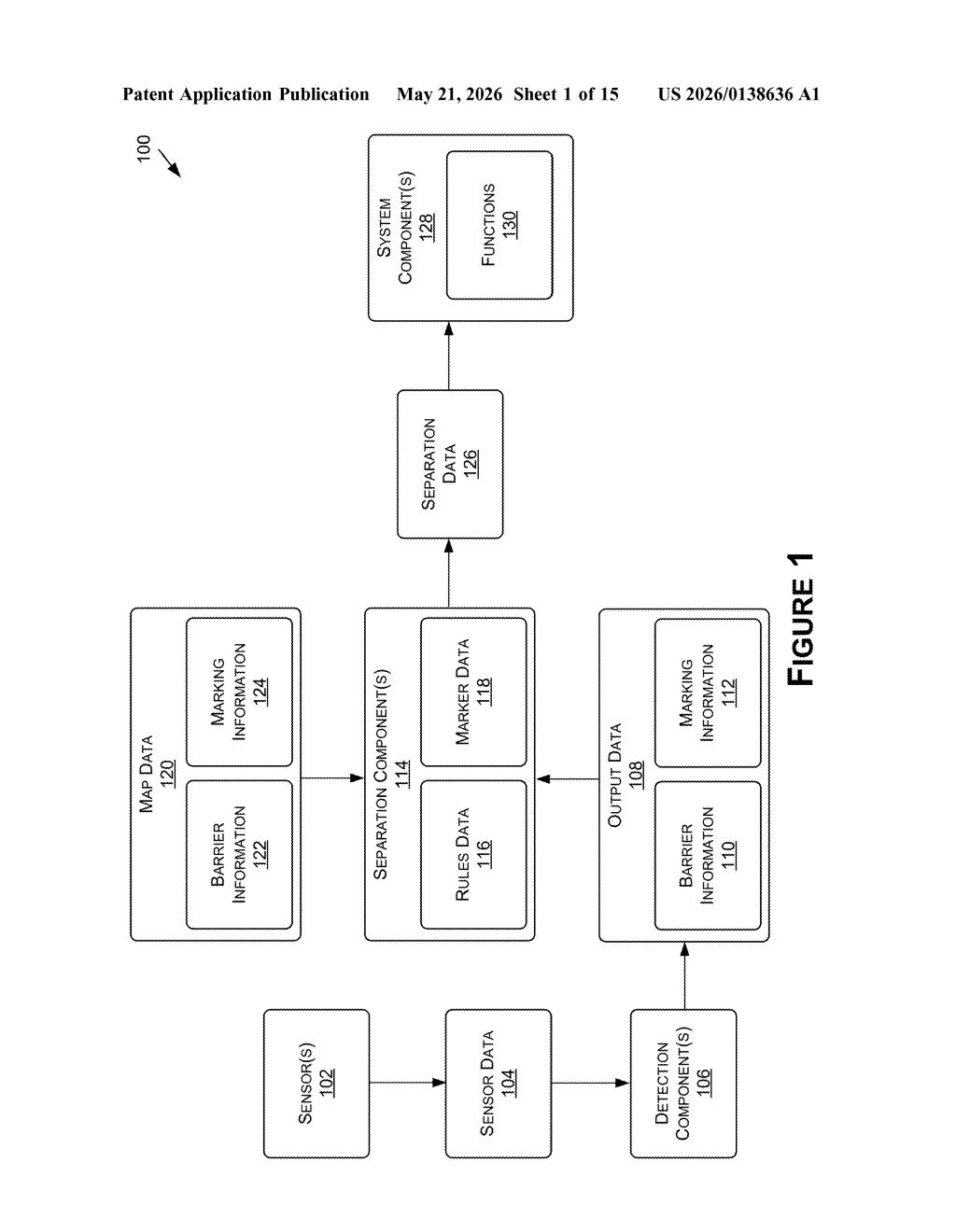
The patent describes a perception pipeline that combines two types of inputs: barrier information (physical objects like guardrails, Jersey barriers, or curbs) and marking information (painted lane lines, arrows, edge markings). Both are pulled from the vehicle's sensor array — likely cameras, lidar, or radar — and fed into what the patent calls a separation component.
The core logic works in steps:
- Detect all road barriers visible to the machine's sensors.
- Identify the closest relevant barrier to the vehicle's current path.
- Cross-reference that barrier's position with surrounding road markings to determine if it separates lanes traveling in opposite directions.
- Classify the road as either a divided driving surface (barrier separates opposing traffic) or a non-divided driving surface (it doesn't).
That classification then feeds directly into autonomous or semi-autonomous functions — things like speed selection, lane-keeping behavior, or collision-avoidance thresholds. The system also references stored rules data and marker data, suggesting it can incorporate pre-mapped road knowledge to validate or supplement real-time sensor readings.
The approach is notable because it doesn't rely on HD maps alone — it actively uses live sensor data, which means it can handle road conditions that maps haven't caught up to yet.
What this means for autonomous vehicle safety logic
For autonomous vehicles, misclassifying a road type isn't a minor bug — it's the kind of error that can cause a car to treat a head-on collision risk as a non-issue, or trigger unnecessary evasive maneuvers on a perfectly safe divided highway. Nvidia's DRIVE platform powers a wide range of AV and ADAS (advanced driver assistance) systems, so a reliable road-separation classifier would have broad downstream impact across any vehicle using that stack.
This patent also reflects a quieter but important design philosophy: don't trust the map alone. Real roads change — barriers get added, removed, or moved — and a system that cross-references live perception data with stored rules is more robust than one that depends entirely on pre-built HD maps. That's a meaningful engineering stance for production-level autonomy.
This is unglamorous but necessary infrastructure work for autonomous driving. Road-type classification sits deep in the stack where it rarely gets headlines, but errors here cascade into everything else the AV decides to do. Nvidia filing this suggests they're hardening the perception layer of DRIVE for real-world messiness — which is exactly where AV systems tend to fail in practice.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.