Zoox Patents an AI That Maps Live Traffic Flow as a Grid of Directional Arrows
Knowing that a car is nearby is one thing. Knowing exactly where it's headed and how fast — at every point in the surrounding area — is something else entirely. Zoox's new patent is about building that second, richer picture.
What Zoox's traffic flow map actually does for a self-driving car
Imagine you're trying to cross a busy intersection and, instead of just glancing at individual cars, you could somehow see the entire flow of traffic as a map of arrows — each arrow pointing the direction cars are moving and scaled by how fast they're going. That's roughly the mental model Zoox wants to give its self-driving vehicles.
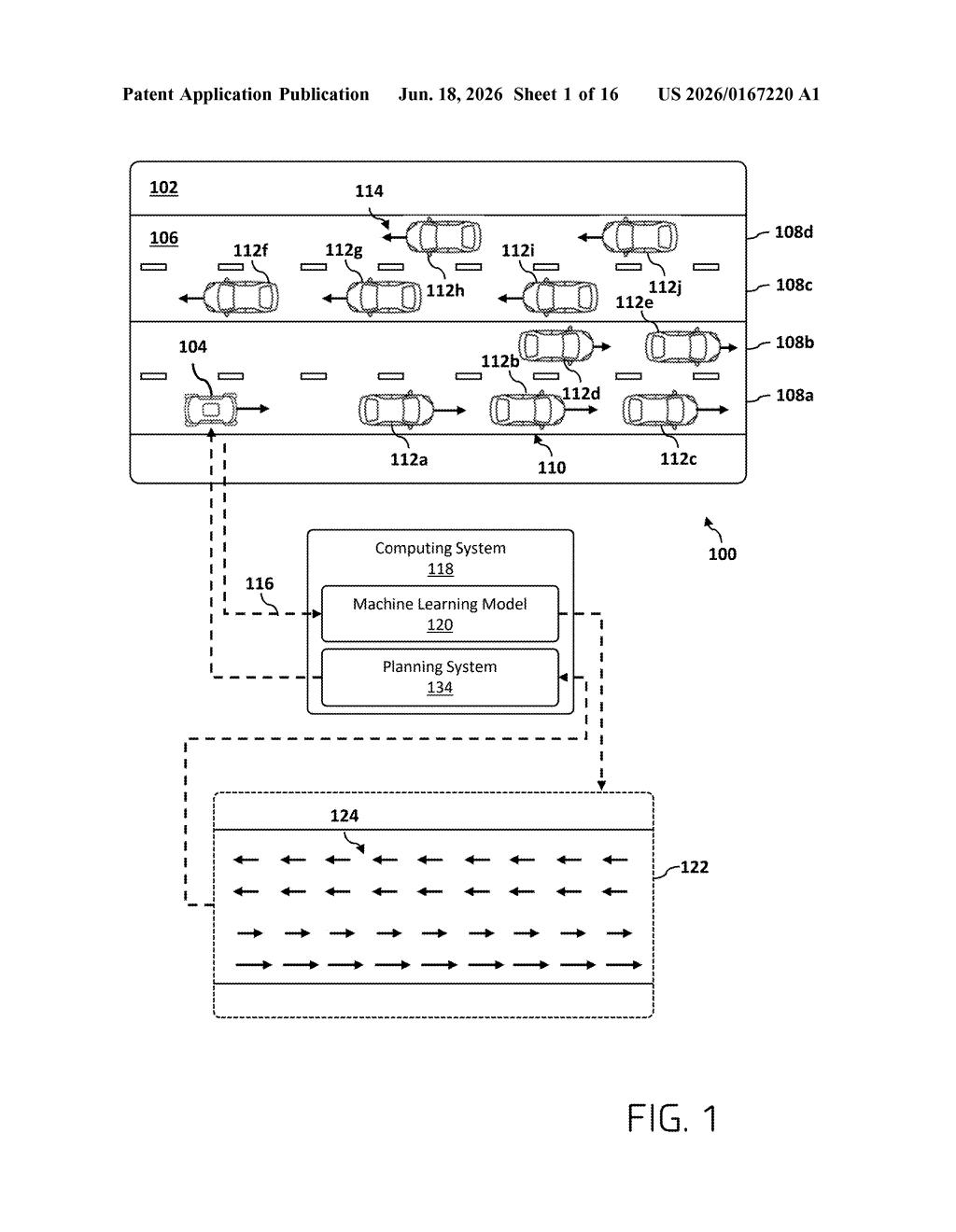
The system takes in live sensor data from everything around the car, then uses an AI model to produce a vector field — a structured grid where every position in the surrounding area gets its own little arrow showing the direction and speed of traffic at that spot. The car then uses that full picture to decide what to do next.
This is different from simply tracking individual vehicles. It gives the car a kind of spatial intuition about how traffic as a whole is flowing — useful at busy intersections, merges, or anywhere movement is complex and hard to predict car-by-car.
How the ML model builds and learns from traffic vector grids
The core output of this system is a vector field — a mathematical structure where each point in a 2D area has an associated vector (think of it as an arrow with both a direction and a length). The direction tells the car which way traffic is moving at that location; the length, or magnitude, encodes how fast.
A machine learning model takes in scene data from the vehicle's sensors and produces this grid of vectors covering the surrounding environment. Crucially, the model isn't just tracking labeled cars — it's inferring a continuous flow map, even in spaces between detected objects.
Training works by feeding the model scenes with known traffic conditions — situations where engineers already have ground-truth data on direction and speed at each position. The model generates its own vector predictions, and its internal parameters are updated based on how far off those predictions were. Over many training rounds, it gets better at matching real-world flow patterns.
The vehicle's control system then ingests the resulting vector field and uses it as one of its inputs for navigation decisions — things like when to yield, which lane to favor, or how to handle an unusual merging situation.
What this means for autonomous vehicle decision-making
Self-driving cars typically track other vehicles as discrete objects — car A is here, car B is there. A vector field approach adds a layer of environmental context: it tells the car what traffic is doing in aggregate, which is often more useful at complex intersections or in dense urban areas where object-level tracking alone can leave gaps in understanding.
For Zoox specifically — which operates a fully autonomous robotaxi with no steering wheel — getting traffic flow right in tight urban conditions is a core safety challenge. A system that gives the car a continuous, spatially aware picture of surrounding movement rather than just a list of nearby objects could make its decision-making more confident and more predictable to the humans sharing the road with it.
This is solid, unsexy infrastructure work — the kind of perception improvement that doesn't make headlines but quietly makes self-driving cars less likely to do something baffling at a busy intersection. The vector field framing is a genuinely useful abstraction, and training an ML model to produce it end-to-end is a cleaner approach than hand-engineering traffic-flow rules. Worth watching as a signal of how Zoox is building its perception stack.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.