Zoox Patents a System Where Robo-Taxis Cross-Check Each Other's Position
What if two self-driving cars could look at each other, compare notes on where they think they are, and use that conversation to get more accurate? That's exactly what Zoox is patenting.
How Zoox's fleet vehicles catch each other's nav errors
Imagine two Zoox robo-taxis passing each other on the same street. Your car's onboard sensors see the other vehicle nearby and estimate where both vehicles are in the world. But sensor estimates aren't perfect — GPS drifts, maps go stale, and lidar has off days.
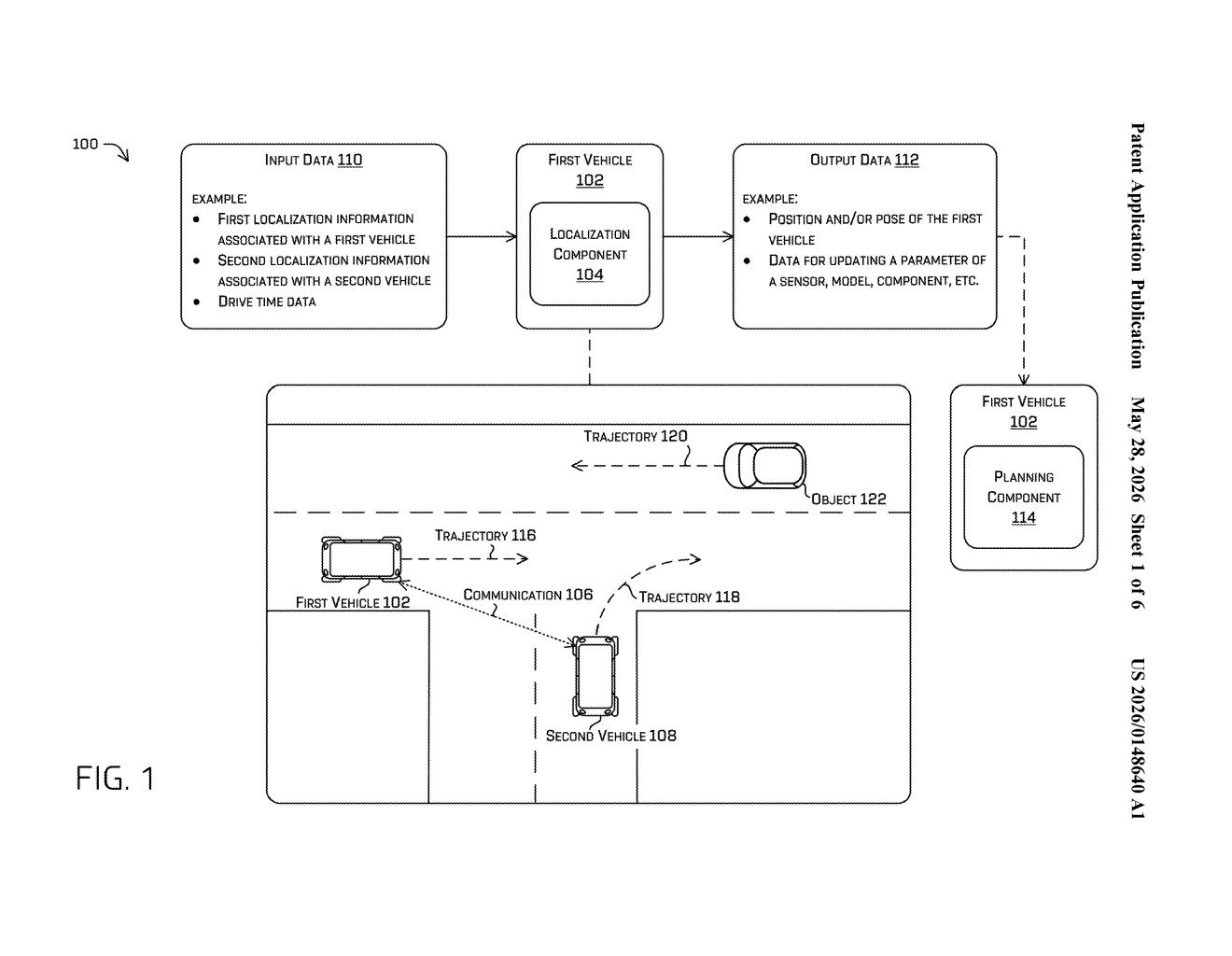
This patent describes a system where the two vehicles — once they confirm they're both part of the same Zoox fleet — actually talk to each other. The second car sends over its own best guess of its position, along with a timestamp of how long it's been driving. Your car uses that trusted, direct data to cross-check and correct its own location estimate.
The key insight is that the pose the second car reports about itself (via the inter-vehicle link) is treated as more reliable than what your car's sensors inferred about the second car from a distance. Your car then uses that higher-trust data to sharpen its own position fix before making any driving decisions.
How pose weights and drive-time data drive the correction
The system starts when a first autonomous vehicle detects a second vehicle nearby using its onboard sensors — lidar, cameras, radar, or some combination. From that sensor data alone, Vehicle 1 estimates two poses: its own position in the world, and a remote estimate of where Vehicle 2 appears to be.
Vehicle 1 then checks whether Vehicle 2 is part of the same fleet. If confirmed, the vehicles open a direct communication channel. Vehicle 2 responds with its own self-reported pose — the position it has computed for itself, which benefits from its own full sensor suite and localization stack — along with a drive-time timestamp (essentially how long it has been navigating, used to gauge data freshness and drift accumulation).
Now Vehicle 1 has two estimates of Vehicle 2's position:
- A sensor-inferred pose (what Vehicle 1 saw from the outside)
- A self-reported pose (what Vehicle 2 says about itself)
The patent assigns a higher weight to the self-reported pose — the logic being that a vehicle's own localization estimate is more accurate than a remote inference. Vehicle 1 then blends these weighted poses to compute a modified pose for itself, which feeds directly into its trajectory planning and control loop. Drive-time data acts as a staleness penalty: a vehicle that has been navigating longer without a fresh fix may receive a lower confidence weight.
What peer-to-peer pose correction means for AV reliability
Localization errors — even small ones — compound over time and are one of the harder unsolved problems in real-world autonomous driving. Most AV systems rely on HD maps, GPS, and onboard sensors working in concert. This patent adds a peer-verification layer that doesn't depend on external infrastructure: if two fleet vehicles are close enough to see each other, they can help each other stay accurate.
For Zoox specifically — which operates a closed fleet of purpose-built robotaxis — this is a practical advantage. A fleet operator controls both vehicles in the exchange, so trust verification is straightforward. You wouldn't notice any of this as a passenger, but it could meaningfully reduce the frequency of edge-case localization failures that lead to uncomfortable or unsafe maneuvers in dense urban environments.
This is a focused, well-scoped engineering patent — not a moonshot. Zoox is essentially treating its fleet like a mesh network for localization, which is a clever use of an asset (multiple vehicles in proximity) that individual AV operators don't have. It's not flashy, but inter-vehicle pose correction is the kind of compounding reliability improvement that separates mature AV fleets from early-stage ones.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.