Nvidia Patents Technology That Rebuilds Real Locations in Three Dimensions from Phone Footage
What if your phone's camera — just one lens, no depth sensor — could reconstruct a full 3D model of everything it filmed? That's essentially what Nvidia is filing a patent to do.
How Nvidia turns regular video into a 3D model
Imagine you walk through a building filming with your phone. Later, you want a precise 3D map of every room. Normally, you'd need specialized hardware — laser scanners, stereo cameras, or depth sensors. Nvidia's patent describes a way to skip all that and build the 3D model purely from regular single-camera footage.
The trick is in how it organizes space. Instead of treating the entire scene as one giant, equally-detailed grid (which would be enormously wasteful), Nvidia's system pays close attention near actual surfaces — walls, floors, objects — and stays deliberately sparse in empty open space. It's a bit like a map that zooms in on neighborhoods and skips the ocean.
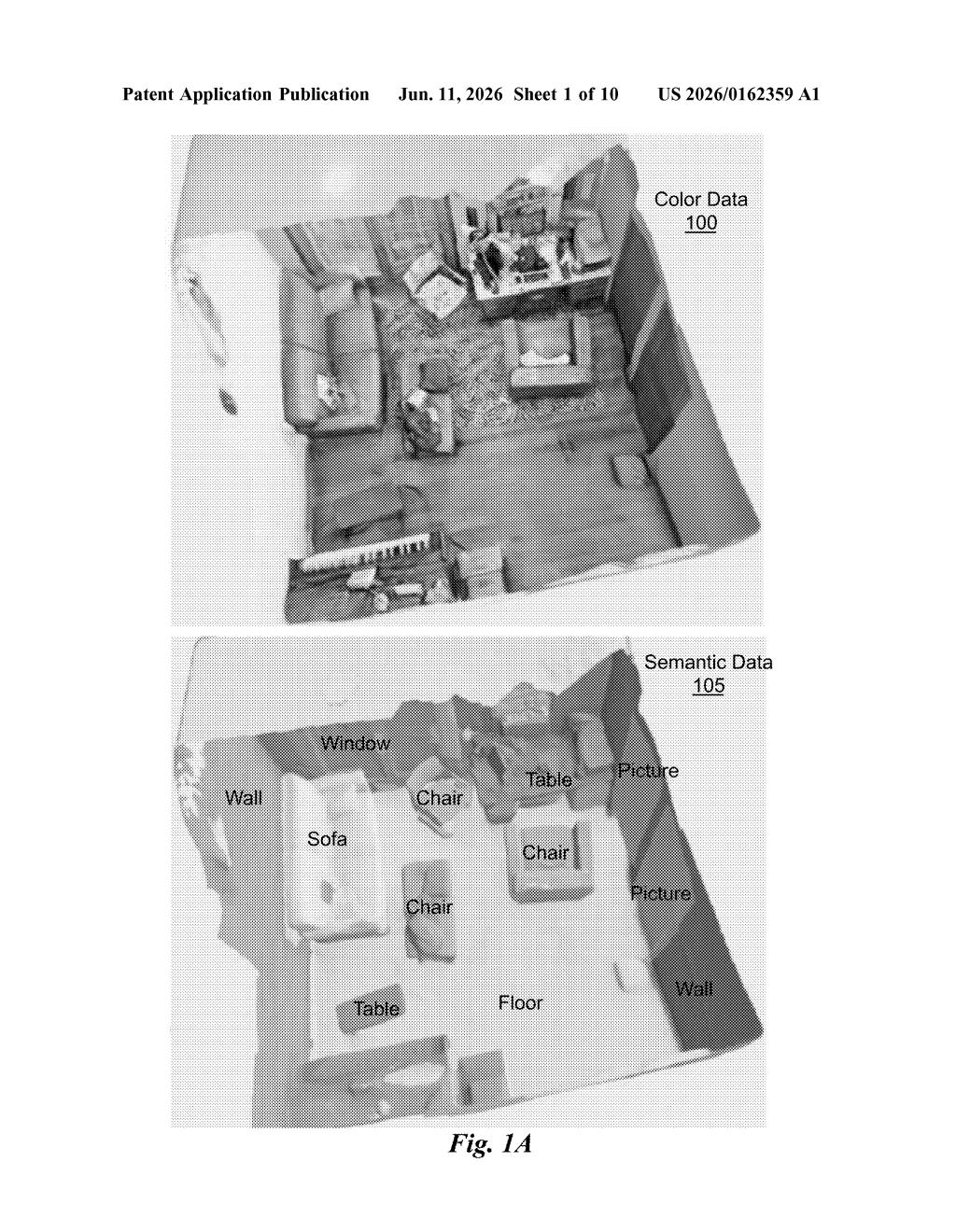
The resulting model isn't just geometry. It also stores color and semantic labels (meaning the system can tag what kind of surface something is, like a floor versus a wall). Because everything is stored in a way that allows the system to learn and self-correct, the 3D reconstruction improves through a process closer to how machine learning trains itself than how traditional computer graphics pipelines work.
Inside Nvidia's sparse-dense voxel grid approach
The patent describes a system that takes a sequence of regular, single-camera (monocular) video frames and reconstructs a full 3D volumetric scene from them — without any special depth-sensing hardware.
The core data structure is what Nvidia calls a globally sparse, locally dense voxel grid. A voxel is just a 3D pixel — a tiny cube of space. The insight here is a two-level approach:
- Globally sparse: Only the parts of the scene that actually contain surfaces get detailed voxel blocks. Empty air between objects is mostly ignored.
- Locally dense: Right around those surfaces, the grid packs in fine-grained detail.
- This makes querying and sampling the structure much more computationally efficient than a uniform grid.
Surface geometry is encoded as a signed distance field (SDF) — a mathematical representation where each point in space stores how far it is from the nearest surface (and whether it's inside or outside an object). This is a common technique in graphics because it's smooth and differentiable.
The differentiable part is key: because all the stored properties (depth, color, semantic labels) can be back-propagated through (meaning errors can flow backward to adjust the model, like in neural network training), the system optimizes its reconstruction through differentiable volume rendering — essentially asking itself "does my predicted camera view match the actual video frame?" and iteratively correcting until it does.
What this means for robotics and autonomous systems
For robotics and autonomous vehicles, building accurate 3D maps of environments is a foundational problem. Systems that require expensive lidar or multi-camera rigs to do it are costly and fragile. A method that works from ordinary single-camera footage — which is what most drones, robots, and cheap sensors already produce — would significantly lower the hardware bar for scene understanding.
For Nvidia specifically, this fits squarely into its push into physical AI and robotics simulation. If robots or autonomous agents can reconstruct accurate 3D environments from commodity cameras, you reduce dependency on expensive sensor suites and open the door to deploying capable systems in a much wider range of settings.
This is solid, technically grounded work in a genuinely competitive research area — monocular 3D reconstruction is one of the hotter problems in computer vision right now. The two-level sparse-dense voxel structure is a real engineering contribution, not just a marginal tweak. Whether it translates into a shipping product or stays foundational research is the open question, but for Nvidia's robotics ambitions, this kind of capability is exactly what the roadmap needs.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.