Waymo's New Patent Teaches Its Cars to See a Few Seconds Into the Future
Before a Waymo car makes its next move, it helps to already "see" what's about to happen. This patent describes a training method that teaches the car's AI to predict what a traffic scene will look like a moment from now — not by guessing, but by learning from thousands of real-world examples where the answer was already known.
What Waymo's future-scene prediction system actually does
Imagine watching a video and hitting pause — then trying to predict exactly what the next few frames will show. That's roughly what Waymo is training its self-driving AI to do, except the "video" is live sensor data from a car moving through real traffic.
The system takes a snapshot of what sensors — like cameras and lidar — have seen up to a given moment, then asks the AI to draw a top-down map of what the scene will look like a second or two later. The AI's prediction gets compared to what actually happened in the real recording. The bigger the gap between prediction and reality, the more the AI adjusts itself to get better next time.
The result is a driving brain that doesn't just react to what's in front of it — it develops an internal model of how the world moves, so it can anticipate a pedestrian stepping off the curb or a car drifting into its lane before either fully happens.
How the neural network learns to predict bird's-eye-view maps
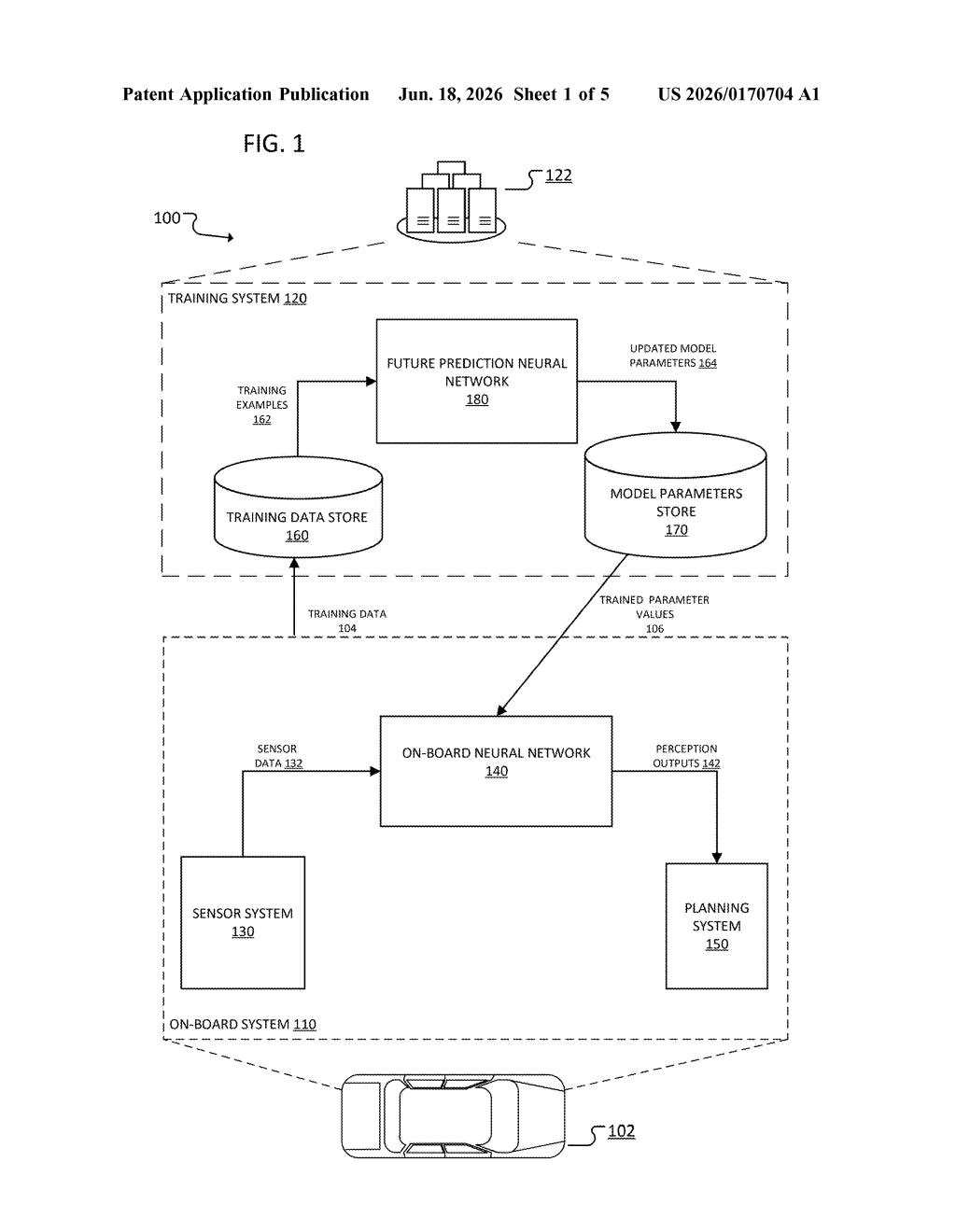
The patent describes a training pipeline for a future prediction neural network — an AI model designed to forecast the immediate future of a driving scene.
Sensor data from the autonomous vehicle (cameras, lidar, radar) is collected across a short window of time. That window is split into two parts: context time steps (the past the AI is allowed to see) and prediction time steps (the future it must guess). For each prediction moment, the AI generates a bird's-eye-view (BEV) representation — essentially a top-down grid map showing where objects are and where they're moving.
Simultaneously, the system generates ground truth BEV maps from the same sensor recordings — these are the "right answers" derived from actual data the AI wasn't shown. Training works by measuring the error between the AI's predicted map and the real one, then adjusting the network's internal weights to shrink that gap over time (a standard process called supervised learning).
Key design elements include:
- Using real sensor data — not synthetic simulations — as both input and ground truth
- Generating BEV maps for multiple future time steps, not just one
- Letting the network learn scene dynamics purely from the task of predicting future sensor states
What this means for self-driving car safety and reliability
Self-driving cars are only as safe as their ability to anticipate — not just detect — what's happening around them. A car that can only react to what's already in front of its sensors will always be slightly behind. A car with a reliable internal model of how traffic scenes evolve has a meaningful head start when it matters most.
Waymo's approach is notable because it uses real sensor data as its own supervision signal, rather than hand-labeled datasets or synthetic environments. That means the more miles Waymo's fleet drives, the better this training system potentially gets — without requiring a human to annotate every scene. For a company competing on the quality of its AI-driven safety record, that kind of self-improving data loop is a genuine structural advantage.
This is core self-driving infrastructure work — the kind of patent that doesn't make headlines but quietly separates the serious players from the rest. Training an AI to predict what a sensor scene will look like — and using that as a self-supervised learning signal — is a well-established idea in robotics research, but Waymo's claim here is in the specific engineering of how it's applied to real autonomous vehicle sensor stacks. Worth watching as a signal that Waymo is investing in perception models that get better with scale, not just better hardware.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.