Nvidia Patents a Way to Test Camera Stitching Before Real Sensors Are Used
When you stitch together video from multiple cameras, the seams between them are the problem. Nvidia's new patent tries to fix those seams before a real camera even rolls.
What Nvidia's synthetic camera calibration actually does
Imagine a car with four cameras mounted around it, each covering a different angle. When software tries to knit those four feeds into one smooth, wide picture, the edges where the images meet often look wrong — blurry, misaligned, or weirdly stretched. Getting that stitching right usually requires a lot of physical testing with real hardware.
Nvidia's patent describes a shortcut: instead of testing the stitching algorithm on real camera footage right away, the system first runs it on synthetic images — computer-generated test patterns designed to reveal exactly how dense or sparse the detail is across every part of the combined picture. Think of it like a printer calibration page, but for camera arrays.
By measuring how well the algorithm handles those test patterns, engineers can tune it before any physical cameras are involved. Then, once they're happy with the results, the calibrated algorithm gets applied to real sensor data to produce the final stitched image.
How the algorithm checks pixel density across stitched zones
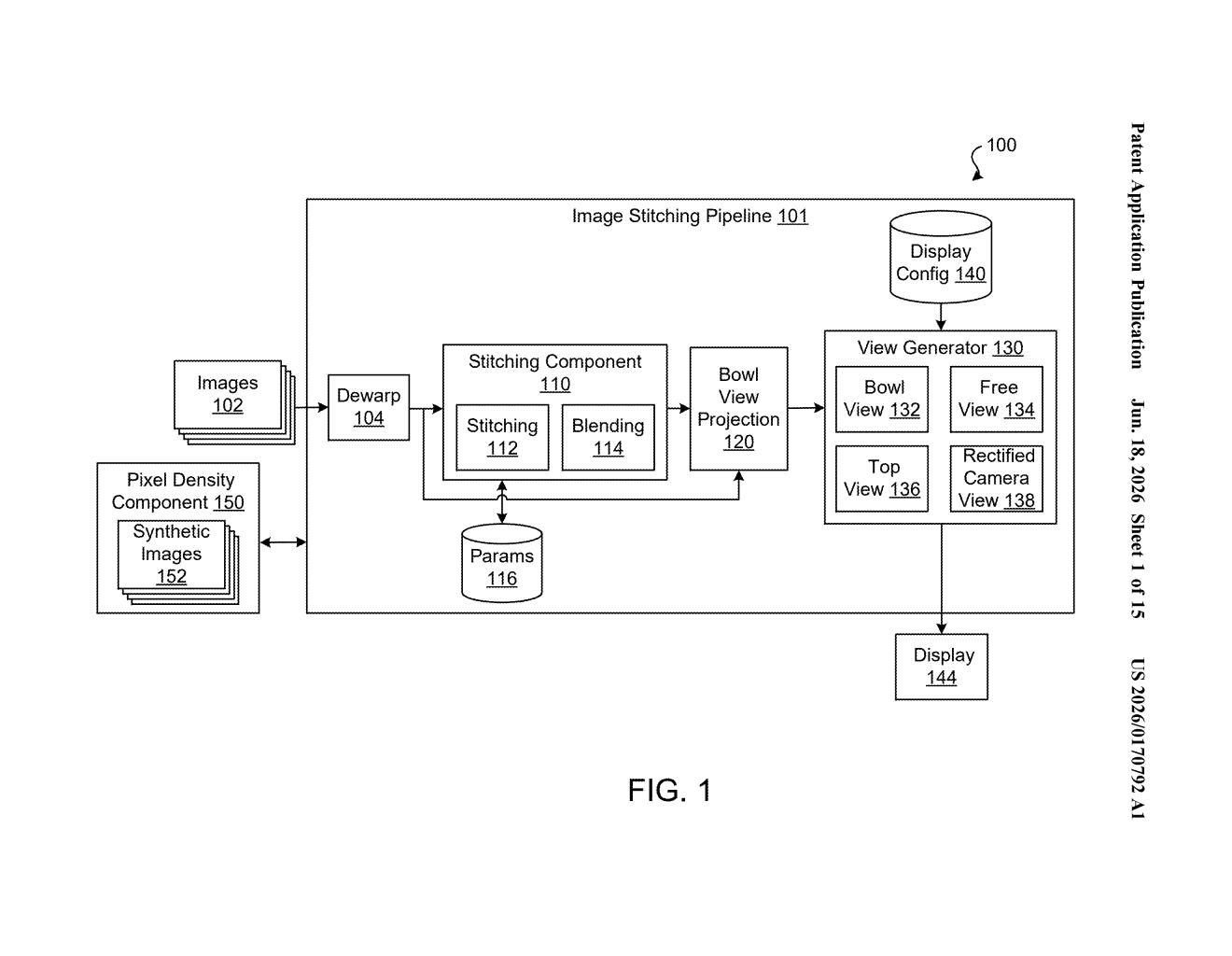
The patent describes a two-stage pipeline for improving multi-camera image stitching:
- Synthetic composite generation: Two or more camera views are simulated digitally, using known sensor positions and orientations. These synthetic images depict structured test patterns — think grids or dot arrays — rather than real-world scenes.
- Feature density measurement: The system analyzes different regions of the stitched composite and calculates feature density (roughly, how much meaningful visual detail exists per area). Low density at a seam zone means the stitching algorithm is losing or smearing information there.
- Algorithm calibration: Based on those density measurements, the stitching algorithm is adjusted — tuning how it blends, warps, or weights pixels at each region — until density is acceptably uniform across the whole image.
- Real-sensor application: The now-calibrated algorithm is then applied to actual sensor data from physical cameras arranged in the same configuration that was modeled synthetically.
The key insight is that running this calibration loop on synthetic images is much cheaper and faster than iterating with real hardware. Engineers can explore different sensor configurations or algorithm settings in software before committing to physical builds.
What this means for multi-camera systems in cars and robots
Multi-camera stitching is essential to autonomous vehicles, robots, and surveillance systems — any platform that needs a wide or full-360-degree view of its surroundings. Bad stitching at the seams can cause a self-driving car to miss an object that falls right on the boundary between two camera feeds, which is a real safety concern.
By offloading calibration to synthetic imagery, Nvidia's approach could cut down the time and cost of validating camera arrays for new vehicle or robot designs. For a company selling hardware and software to the autonomous-vehicle industry, that kind of faster iteration cycle matters — your sensor suite gets validated in simulation first, then confirmed with real cameras, rather than running expensive physical tests from the start.
This is solid, practical engineering work aimed squarely at Nvidia's autonomous-vehicle and robotics customers. It won't make headlines outside a niche audience, but the underlying problem — stitching artifacts at camera seams — is a real obstacle in production AV systems, and a synthetic-first calibration loop is a sensible way to attack it.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.