Samsung Patents a Robot Hand Where Each Finger Moves Itself Into Position
Most robot hands treat their fingers as fixed in place — they bend and grip, but they can't reposition the way a human hand fans its fingers out or closes them inward. Samsung's new patent describes a hand where each finger can swing itself into a new position using its own dedicated motor.
What Samsung's self-repositioning robot fingers actually do
Imagine trying to pick up a thin credit card versus a large water bottle. Your hand doesn't just close your fingers — it spreads or narrows them first to match the object. Most robot hands can't do that well. Samsung's patent describes a robot hand designed to change the spacing and angle of its fingers automatically, not just bend them.
Each finger in this design is its own self-contained unit, with two separate motors inside: one that bends the finger like you'd expect, and a second one that rotates the entire finger left or right to reposition it. Neighboring fingers are linked by interlocking gears, so when one finger's repositioning motor runs, the finger pivots around a central shaft and physically moves its position.
The result is a hand that can fan out for a wide grasp, pinch together for a narrow one, or take on unusual configurations — all without a human manually adjusting anything.
How the arrangement motors and meshing gears rotate each finger
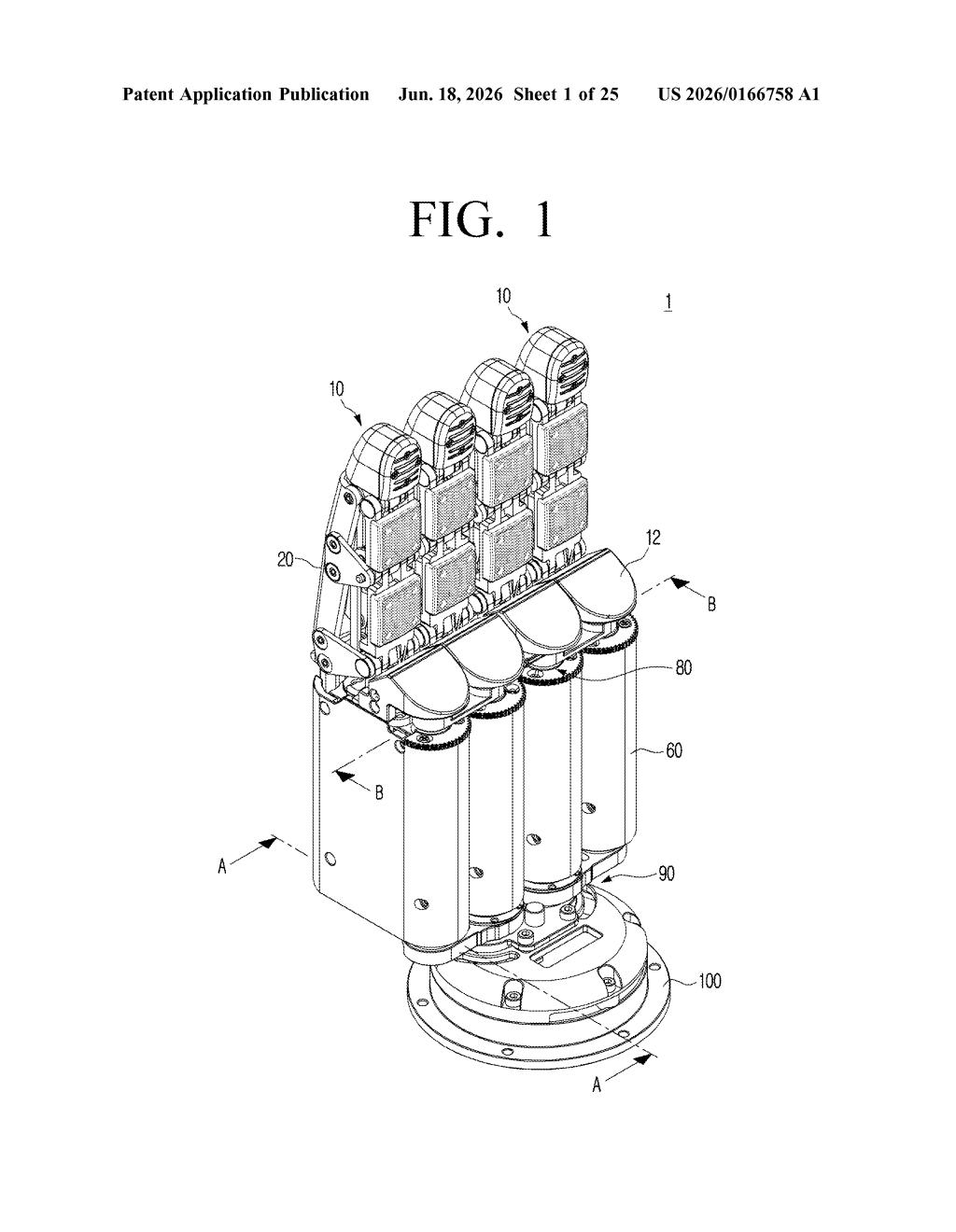
The patent describes a robot hand made up of several finger modules, each one a self-contained mechanical unit. Each module contains:
- A finger with multiple joints for bending
- A finger motor that drives those bending movements (essentially the knuckle actuator)
- An arrangement motor — a second, separate motor that controls where the finger points or how far it is from its neighbors
- A housing that sits beneath the finger and contains both motors
- An arrangement gear mounted on top of the housing, aligned with the arrangement motor's central shaft
The clever part is how adjacent finger modules interact. The arrangement gears of neighboring fingers mesh directly with each other — like interlocking cogs. When one finger's arrangement motor runs, that finger pivots around the arrangement motor shaft. Because the gears are meshed, the movement also influences the neighboring finger, allowing coordinated repositioning across the hand.
This is different from hands that only control finger curl (closing and opening). Here, the lateral position of each finger — essentially its address on the hand — becomes programmable in real time, letting the hand reshape itself for different object geometries.
What this means for robot dexterity in real-world tasks
Robot hands today are often designed around a fixed finger layout, meaning engineers have to pick one configuration and live with it. A hand that can reposition its fingers dynamically is more adaptable — useful in manufacturing, where the same robotic arm might need to handle very different parts in sequence, or in home robotics, where objects vary enormously in size and shape.
For Samsung, which has been investing in humanoid and service robotics, this kind of dexterous hand design would be a core building block. If you imagine a robot that can sort groceries, fold laundry, or assist with assembly work, how well it can reconfigure its grip is as important as raw strength or speed.
This is solid, practical robotics engineering — not flashy, but the kind of foundational hand design that actually matters when you're trying to build a robot that can handle the messy variety of real-world objects. The gear-mesh approach for coordinating finger position is a clean solution to a hard mechanical problem. Worth watching as Samsung pushes deeper into humanoid robotics.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.