Nvidia Patent Teaches Self-Driving Cars to Safely Negotiate Yield Scenarios
One of the hardest problems for self-driving cars isn't speeding down a highway, it's the messy, social negotiation of a four-way stop. Nvidia's latest patent tackles exactly that, giving autonomous vehicles a structured way to figure out who goes first, even when other drivers are hidden from view.
How Nvidia's yield planner handles tricky intersections
Imagine you're pulling out of a parking garage onto a busy street, and a van is blocking your view of oncoming traffic. A human driver instinctively slows down, peeks forward, and makes a judgment call about whether anyone hidden behind that van is legally required to stop for you. Nvidia's patent describes a system that lets a self-driving car do the same thing.
When the car's sensors detect a spot it can't see into, a blind corner, a blocked lane, the system figures out whether any potential vehicle hiding there would be legally required to yield. If traffic rules say that hidden driver has to give way, the self-driving car can plan its move with more confidence, rather than stopping dead every time something is out of sight.
This matters because overly cautious self-driving cars can cause their own problems: rear-end collisions, blocked intersections, frustrated drivers behind them. A system that reasons about right-of-way, not just raw sensor data, lets the car act more like a predictable, experienced human driver.
Inside the wait element data structure and yield logic
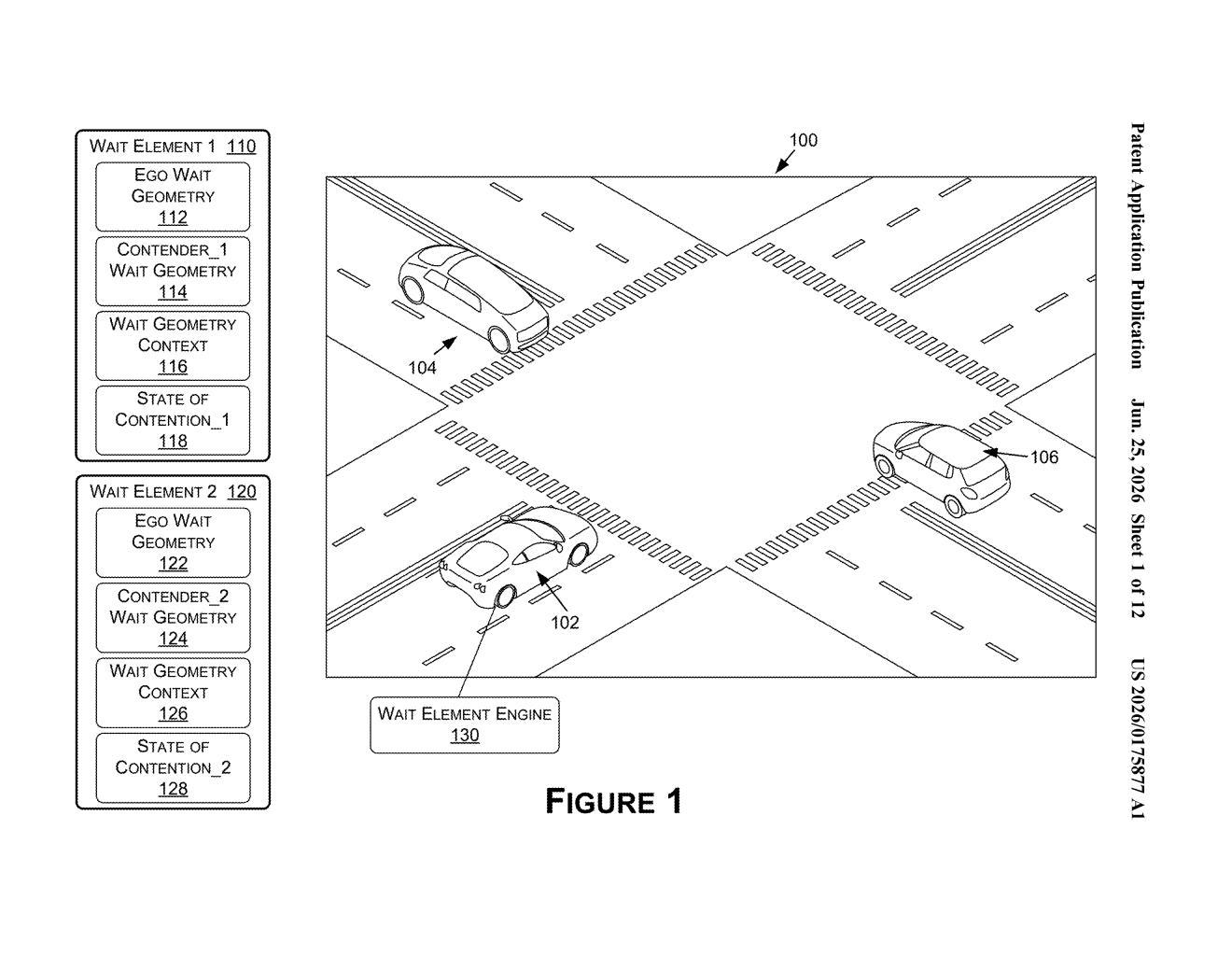
The patent describes a pipeline that kicks in whenever an autonomous vehicle detects what it calls a yield scenario, any situation where two vehicles' paths overlap and one of them has to wait.
When such a scenario is detected, the system builds a data structure called a wait element. This package encodes:
- The car's own planned path (the "ego path")
- The path of the other vehicle or potential vehicle (the "contender path")
- The specific point where those paths conflict (the "contention point")
- Contextual geometry like intersection boundaries and entry/exit lines
A dedicated yield planner module receives this data structure and uses it to determine the right behavior. Crucially, the first independent claim focuses on occluded regions, areas the car literally cannot see. The system infers what a hidden actor would most likely do based on traffic rules and right-of-way precedence, then generates a motion profile (a prediction of how that hidden vehicle would move if it were following the law).
The car's control system then acts on that prediction, moving forward with appropriate caution rather than freezing at every blind spot.
What this means for self-driving car safety at intersections
At scale, self-driving cars that handle yield scenarios badly are a real safety problem, not because they drive too aggressively, but often because they drive too timidly. A car that stops at every intersection blind spot can trigger chain-reaction incidents or simply become impossible to use in dense urban environments.
Nvidia supplies the computing hardware and software stacks that many autonomous vehicle companies build on. A patent like this sits at the core of how those vehicles make real-time decisions. If this approach makes it into production systems, it could directly affect how robotaxis and delivery vehicles behave at the millions of ambiguous intersections they encounter every day.
This is genuinely important work dressed in dry technical language. Yield scenarios at occluded intersections are a known failure mode for autonomous vehicles, and the framing here, using traffic law as a predictive tool rather than just reacting to sensor data, is a sensible and specific engineering answer to that problem. It won't make headlines the way a flashy AI demo does, but it's the kind of patent that actually determines whether self-driving cars are safe to deploy at city scale.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.