Zoox Patents Software That Scores and Refines Its Own Driving Route Decisions
Every fraction of a second, a self-driving car has to pick one path from thousands of possibilities. Zoox's latest patent describes a system that generates those options, grades each one, and keeps refining its choices until it lands on the best route.
How Zoox's self-correcting route picker actually works
Imagine you're planning a road trip and you sketch out dozens of possible routes. Then you score each one on traffic, distance, and road quality, throw out the worst options, and redraw better routes based on what survived. Zoox's system works the same way, except it does this thousands of times per second for a moving car.
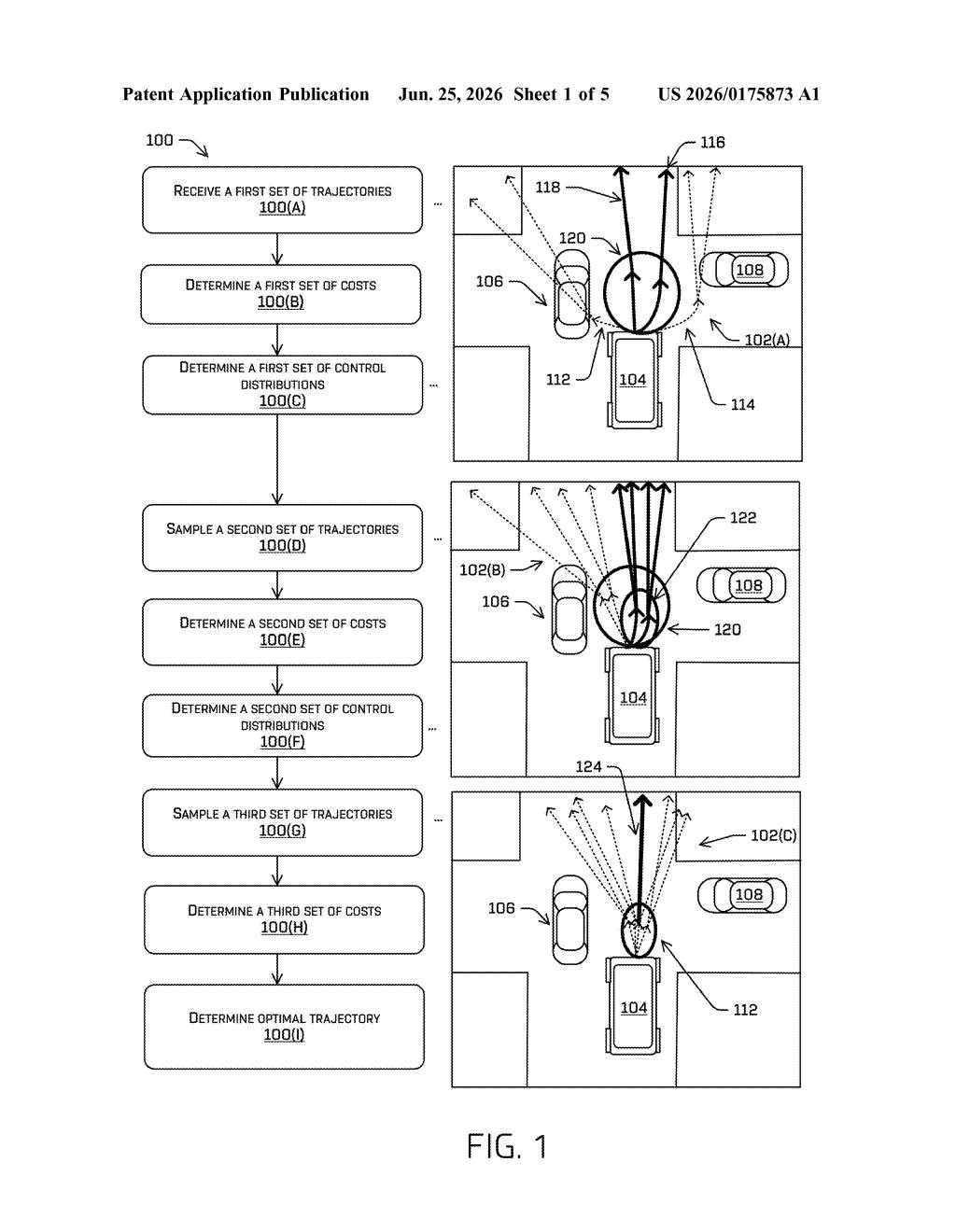
The system starts with a broad set of possible ways the car could steer, accelerate, or brake. It tries all of them in simulation, assigns each a cost score based on things like safety or efficiency, and keeps only the promising ones. Those survivors then inform a fresh, tighter set of options, and the cycle repeats.
The result is a driving decision that gets sharper with each loop, rather than just picking from a fixed menu of preset maneuvers. It's a way of making the car's planning process adapt to whatever specific situation it's in right now.
How the cost-based control loop narrows down trajectories
The patent describes a trajectory-planning architecture built around iterative sampling and scoring. At its core, the system maintains a control distribution (essentially a probability model describing how the car might steer, accelerate, or brake at each moment in time).
From that distribution, the system samples a large batch of control sequences, each one representing a complete candidate trajectory through the environment. Each trajectory is then evaluated against a set of costs (penalties for things like getting too close to other vehicles, veering off the road, or making uncomfortable stops).
The key step is what happens next: instead of just picking the lowest-cost trajectory and driving it, the system uses the better-scoring subset to update the underlying control distribution itself. That updated distribution is then used to generate the next round of candidates, which are likely to cluster around more promising regions of the solution space.
- Generate candidate trajectories from the current control distribution
- Score each trajectory on safety, comfort, and efficiency costs
- Select the top-performing subset
- Refit the control distribution to match those survivors
- Repeat until the distribution converges on a high-quality trajectory
This approach is related to a class of optimization methods sometimes called cross-entropy optimization or model-predictive path integral control, both of which are established techniques in robotics research applied here to real-time autonomous driving.
What this means for robotaxi decision-making
Path planning is one of the hardest problems in autonomous driving. A car navigating a busy intersection can't rely on a simple lookup table of pre-written maneuvers. It needs a system that can handle the specific geometry, speed, and behavior of every other object around it right now. A feedback loop that continuously refines its own probability model is a more principled way to do that than generating a fixed list of options and picking the best one.
For Zoox specifically, which is building a purpose-built robotaxi that operates without a human backup driver, getting this right isn't optional. Whether this particular patent ends up in production hardware or serves mainly as a defensive filing is hard to say, but the direction it points, toward adaptive, self-correcting planning loops, reflects where serious autonomous vehicle research is heading.
This is solid, technically grounded work in a competitive area of autonomous vehicle research. It's not a flashy user-facing feature, but iterative trajectory refinement is exactly the kind of unglamorous problem that separates reliable robotaxis from ones that freeze up at complex intersections. Worth watching if you follow AV development.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.