Zoox Patents a System That Repositions Its Robotaxis to See Around Blocking Vehicles
A large truck pulls up alongside a Zoox robotaxi and blocks its sensors from reading a traffic signal ahead. This patent describes a system that would make the car automatically shift its position to get a clear look.
How Zoox's robotaxi moves itself for a better view
Imagine you're driving and a big semi-truck slides into the lane next to you, completely hiding the traffic light ahead. A human driver would naturally drift forward or shift lanes a little to peek around it. This patent describes a system that would let a Zoox self-driving car do the same thing on its own.
The car's sensors constantly scan the road for things that matter, like traffic lights, stop signs, and construction workers. At the same time, the system keeps an eye on large objects like buses and trucks that could block those important things from view. When a potential route would leave the car "blind" to something important, the system calculates a penalty for that path and looks for a better one.
The car then steers itself along a revised path that restores its sensor's line of sight to whatever it needed to see. It's essentially the self-driving version of craning your neck to see around someone tall at a concert.
How the cost-trajectory system picks a better angle
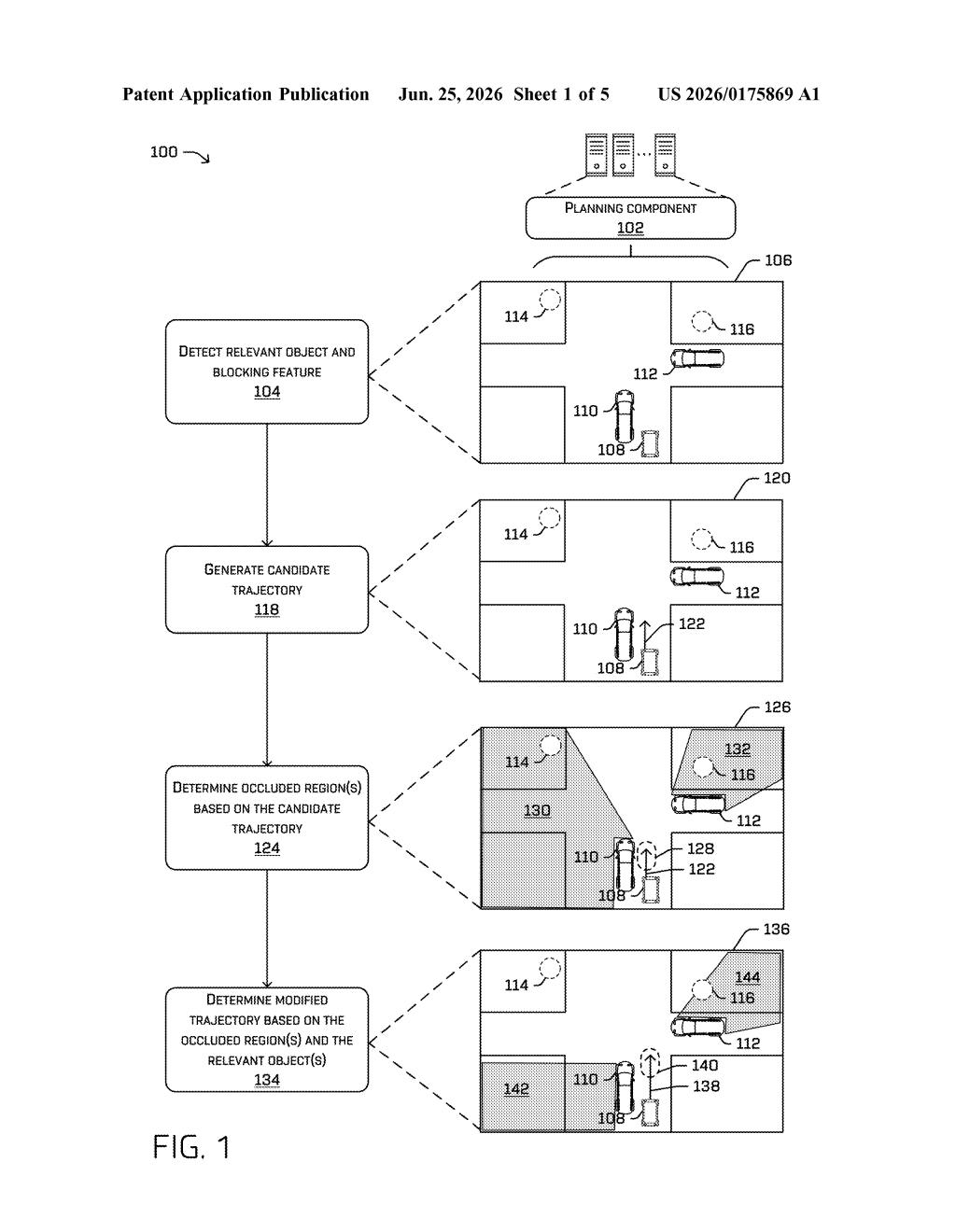
The system works in three broad stages running continuously as the vehicle moves.
First, scene classification: the car's sensors (cameras, lidar, radar) build a live picture of the surrounding environment. The system tags objects as either relevant (things the car needs to perceive to drive safely, like traffic signs or construction workers) or blocking (large, opaque objects like semi-trucks or buses that can physically obstruct the sensor's line of sight).
Second, trajectory evaluation: the planning software generates candidate trajectories (possible future paths for the car to follow). For each candidate path, the system calculates an occluded region (the blind zone created when a blocking object sits between the car's sensors and a relevant object). If a relevant object falls inside that blind zone, the trajectory receives a higher cost value (a numeric penalty used to rank options). Higher cost means a worse choice.
Third, path modification: the system selects or generates a modified trajectory that lowers the cost by repositioning the vehicle to a vantage point where its sensors can see the relevant object clearly. The car is then steered along that modified path.
The whole loop runs fast enough to respond to shifting traffic conditions in real time.
What this means for robotaxi safety in dense city traffic
For self-driving vehicles operating in dense city environments, sensor occlusion (being blocked from seeing something important) is one of the hardest problems to solve purely in software. Most approaches try to infer what might be hidden; this patent takes the more direct approach of moving the car to eliminate the blind spot in the first place. That's a meaningful philosophical shift in how a robotaxi handles uncertainty.
For riders and pedestrians, the practical payoff is a car that is less likely to be caught off guard by a traffic light or a construction worker it simply couldn't see from where it was sitting. In cities with heavy truck and bus traffic, that difference could matter a lot.
This is a genuinely interesting approach to a real, unsolved problem in autonomous driving. Most AV perception work tries to model or predict what's hidden; Zoox is patenting the behavior of physically moving to un-hide it. Whether the actual system works well in dense city traffic is a separate question, but the underlying logic is sound and the problem it's solving is not a minor edge case.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.