Zoox Patents a Lattice-Based Motion Planner That Reprices Trajectories Around Live Objects
Zoox's latest patent describes a driving system that doesn't just pick a route — it pre-bakes a web of possible paths and then reprices them on the fly when a pedestrian, cyclist, or car shows up unexpectedly.
How Zoox's motion planner responds to objects on the fly
Imagine your GPS not just picking one route, but quietly pre-planning dozens of possible paths through a neighborhood before you even get there. Then, the moment a dog runs into the street, it doesn't start over from scratch — it just picks the best pre-built path that avoids the dog. That's roughly the idea here.
Zoox's patent describes a system that builds a lattice — a grid-like map of possible vehicle states and the legal moves between them — ahead of time using known map data. Each path through that lattice has a pre-calculated cost (think: how risky or inefficient it is).
When the car's sensors detect a real-world object, the system updates the cost of paths near that object rather than recomputing everything from zero. The vehicle then follows the cheapest viable path. It's a way to make real-time decisions without the computational overhead of re-solving the whole problem mid-drive.
How the lattice graph and cost updates steer the vehicle
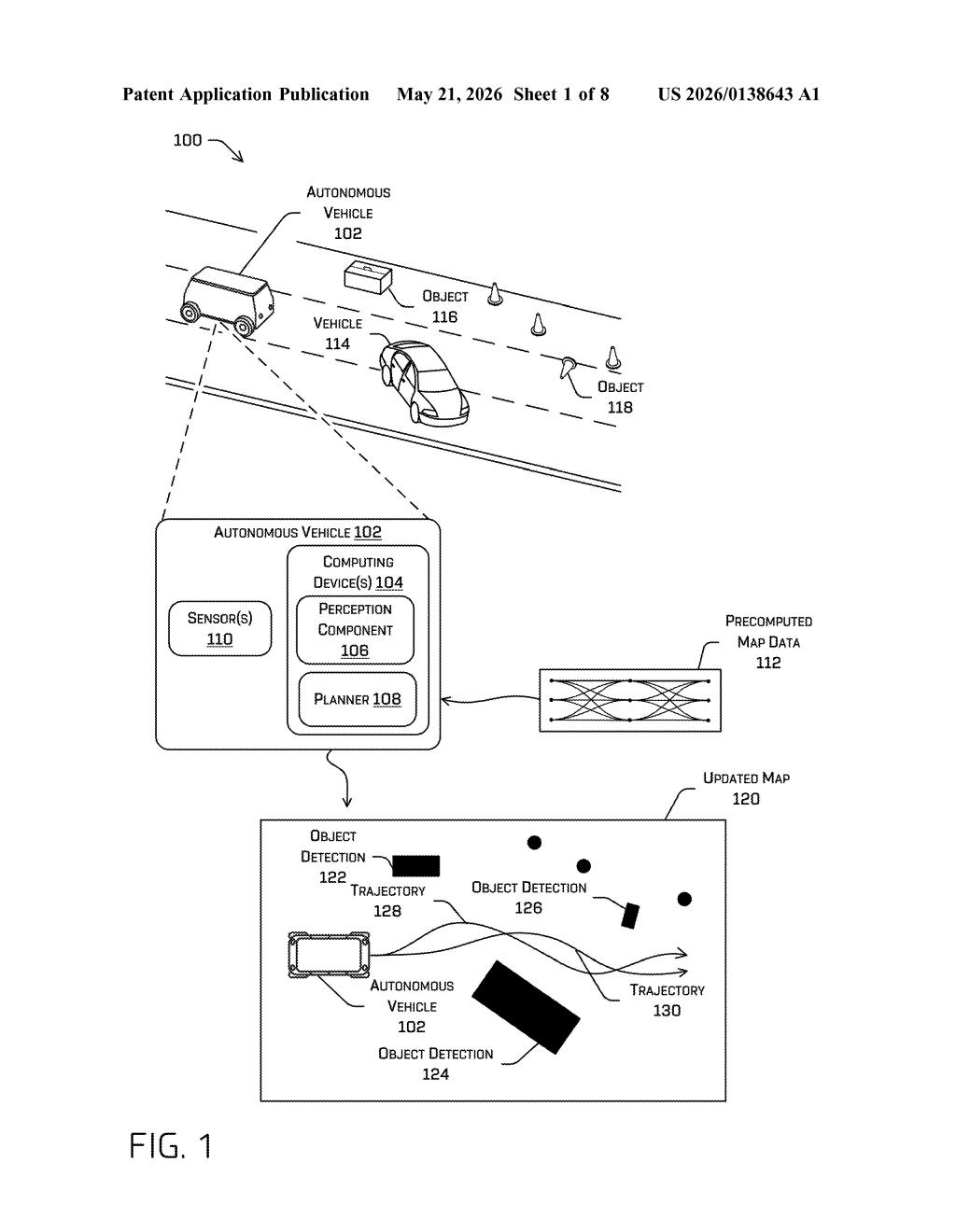
The system starts by receiving a route and pulling in map data for the relevant stretch of road. From that, it builds a lattice — a graph structure where nodes represent discrete vehicle states (position, speed, heading) and edges (connections) represent feasible transitions between those states. Think of it like a chess board of possible moves, pre-computed before the drive begins.
A specific chain of connections through the lattice defines the trajectory — the planned path from start to end. Crucially, the costs along those connections are precomputed, meaning the heavy math is done in advance using static map knowledge.
When the vehicle's sensors detect an object in the environment, the system determines the object's state (position, velocity, predicted behavior) and uses that to modify the precomputed cost on relevant trajectory segments. This is a targeted update, not a full replanning pass — which is significantly cheaper computationally.
Finally, the system derives a refined trajectory based on the updated cost landscape and outputs it to the vehicle's control stack. The patent explicitly separates the offline precomputation phase from the online sensor-reactive update phase, which is the core architectural claim.
What this means for real-time autonomous driving replanning
Real-time motion planning is one of the hardest problems in autonomous driving — you need to make safe decisions in milliseconds, but the math for finding optimal paths is expensive. By splitting the work into a precompute-offline, update-online pattern, Zoox is targeting the latency problem directly. If costs can be patched rather than recalculated wholesale, the system can react faster to dynamic obstacles like pedestrians or cyclists.
For Zoox, which operates a fully driverless robotaxi fleet in Las Vegas and San Francisco, this kind of low-latency replanning isn't academic — it's table stakes. The patent also fits neatly into Zoox's vehicle-purpose-built architecture, where the software stack is designed from scratch rather than retrofitted onto a human-driven platform.
This is solid, workmanlike autonomous driving infrastructure — not a flashy AI trick, but exactly the kind of computational efficiency work that separates robotaxi operators that scale from those that struggle with edge cases. The lattice-plus-cost-update pattern is well-established in robotics research, so the patent's novelty likely lives in the specific implementation details rather than the concept itself. Worth watching as a signal of where Zoox is investing engineering attention.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.