Waymo Patents a Lidar System That Sniffs Out Retroreflectors Before They Blind It
Reflective road signs and bike reflectors can overwhelm a self-driving car's lidar sensor, flooding it with so much light that nearby objects become invisible. Waymo's new patent describes a clever probe-and-adjust system that detects those blinding surfaces before they cause a problem.
Why retroreflectors are a headache for Waymo's lidar
Imagine you're shining a flashlight down a dark hallway and you suddenly hit a mirror — the bounce-back is so intense it washes out everything else you were trying to see. That's roughly what happens when a self-driving car's lidar hits a retroreflector: a surface (like a road sign, traffic cone, or bicycle reflector) engineered to bounce light almost perfectly back toward its source.
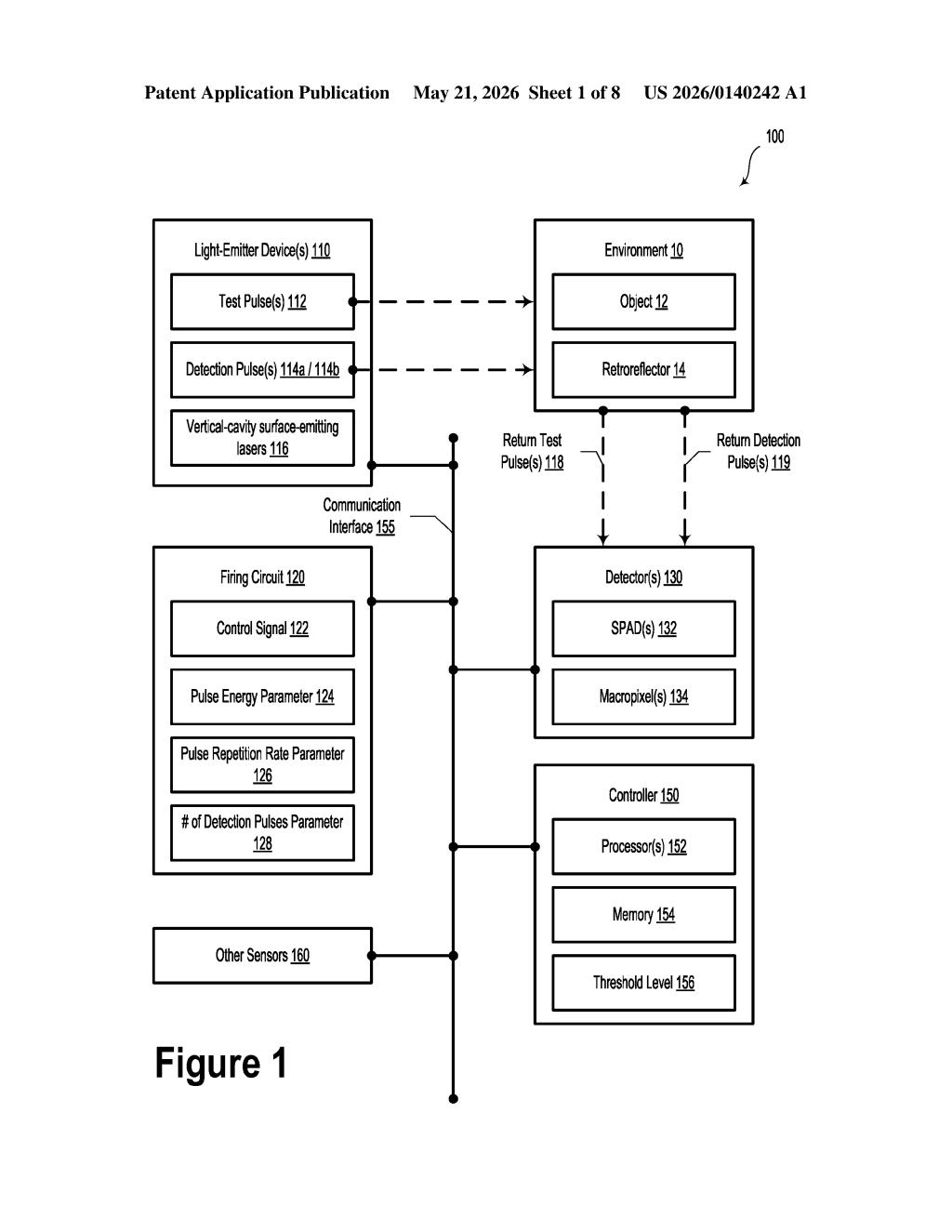
Waymo's patent describes a system that fires a low-stakes test pulse at a target area before committing to a full-power scan. If the return signal comes back unusually bright — a telltale sign of a retroreflector — the lidar automatically dials back its next pulse's power or duration so the detector isn't overwhelmed.
Think of it like how your phone's camera quickly flashes a low-power pre-flash to measure the scene before the real photo flash fires. Waymo is applying the same idea to lidar, so its vehicles can keep getting reliable depth data even when the environment throws highly reflective surfaces into the mix.
How Waymo's test-pulse probing sequence actually works
The system works in two phases. First, the lidar fires a standard set of detection pulses — the regular scans used to build a 3D map of the surroundings. Alongside or just before those, the controller triggers one or more test pulses aimed at the same region.
Here's the key twist: the test pulses are deliberately more powerful or longer in duration than the normal detection pulses. The detector captures the return signal from those test pulses and the controller analyzes the intensity. A very high return intensity flags the target as a retroreflector or an otherwise unusually bright object.
Once that flag is raised, the system determines a revised set of emission parameters — lower amplitude, shorter pulse width, or both — and applies them to the next round of detection pulses aimed at that area. The result is a continuous feedback loop:
- Fire test pulse at a region
- Measure return intensity
- Classify object as retroreflective or normal
- Adjust subsequent pulse parameters accordingly
This prevents detector saturation (where the sensor is so overwhelmed by reflected light it can't distinguish anything useful) while still maintaining the ability to detect low-reflectivity objects nearby. The firing circuit and controller work together to implement this adaptively across different zones of the lidar's field of view.
What adaptive lidar means for self-driving reliability
Retroreflectors are everywhere in real-world driving environments — construction zone equipment, lane markers, cyclists' gear, emergency vehicles. A lidar that can't handle them gracefully doesn't just lose data on the reflective object itself; the saturation can corrupt readings for nearby objects too, which is far more dangerous. Waymo's adaptive approach means the sensor degrades gracefully rather than catastrophically when it encounters these surfaces.
For Waymo's commercial robotaxi operations, this kind of robustness engineering is table stakes. Urban environments are full of edge cases that highway-focused lidar designs never anticipated. A system that proactively manages its own dynamic range — rather than relying on post-processing to clean up saturated data — could meaningfully reduce perception errors in exactly the messy, signage-heavy city blocks where Waymo's vehicles operate every day.
This is solid, unglamorous engineering — the kind of work that separates production-grade autonomous systems from research demos. Retroreflector saturation is a known, documented failure mode for lidar, and Waymo is patenting a clean closed-loop solution for it. It won't make headlines at a product launch, but it's the sort of reliability plumbing that actually determines whether a robotaxi fleet can operate 24/7 without human babysitting.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.