Nvidia Patents a Selective Radar Sampling System for Self-Driving Cars
Automotive radar generates a flood of signal data that most cars simply don't have the bandwidth to fully process. Nvidia's new patent describes a way to surgically extract only the most meaningful slices of that data — and pipe them straight into a machine learning model.
What Nvidia's radar patch sampling actually does
Imagine a radar sensor on a self-driving car sweeping the road ahead. It's constantly generating a dense grid of data — far more than the cable connecting that sensor to the car's main computer can realistically carry at high speed. Something has to get cut. The question is: what?
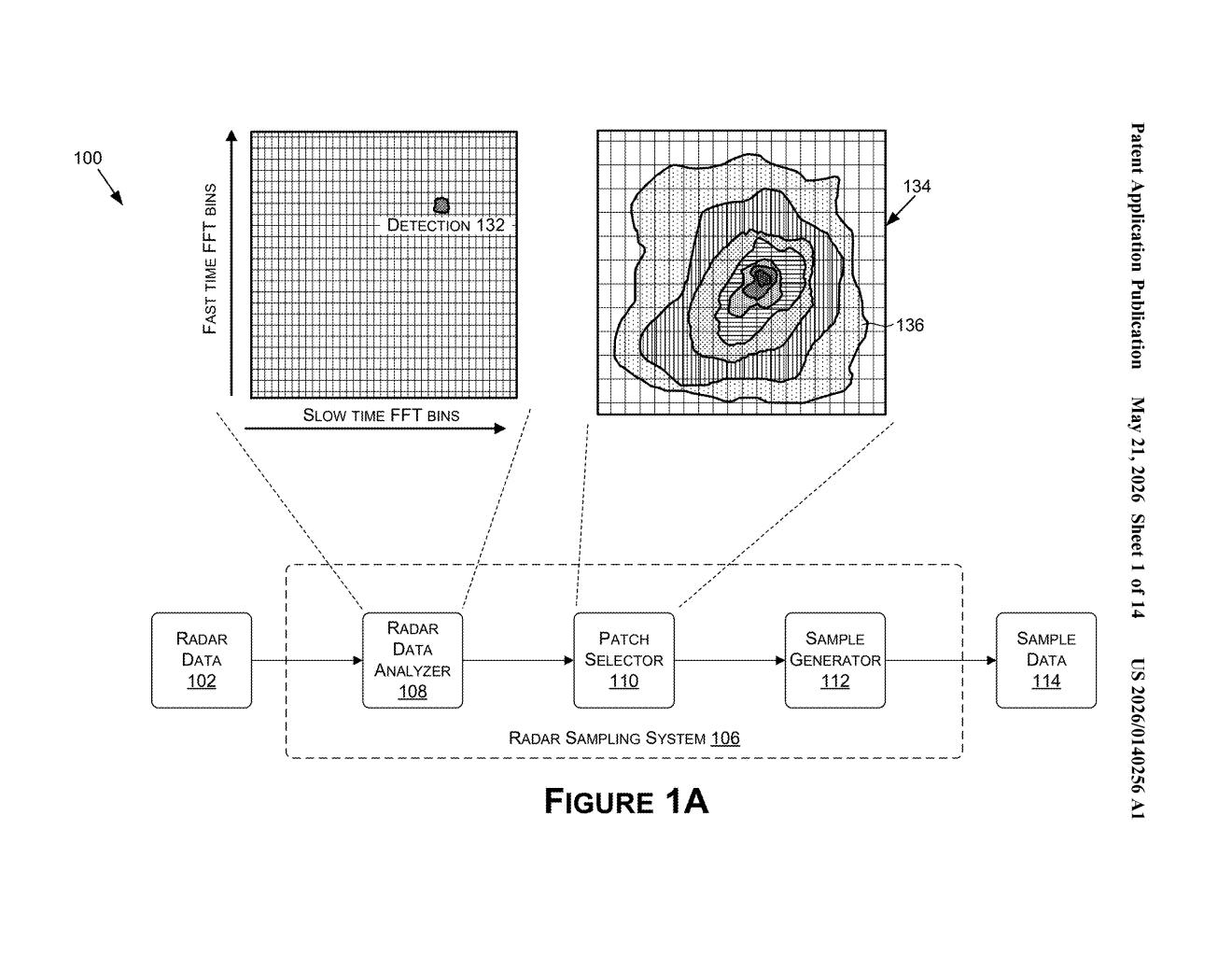
Nvidia's patent describes a system that identifies the interesting parts of the radar signal first — the spots where objects are actually detected — and then selects a small "patch" of nearby data points to transmit. Think of it like cropping a photo around the subject instead of sending the entire 48-megapixel file every time.
That cropped patch is then fed into a machine learning model on the car's main processing unit, which uses it to classify and track whatever the radar spotted. The result: less bandwidth used, less storage needed, and — if the approach works as described — no meaningful loss in detection quality.
How Nvidia picks and transmits frequency bin patches
The patent centers on a process Nvidia calls patch-based radar sampling. Radar signals are typically represented as multi-dimensional grids of frequency bins — discrete buckets that encode range, velocity, and angle information about objects in the scene. A full radar frame can be enormous; transmitting all of it over the link between sensor and compute unit is a real bottleneck.
The system works in roughly three steps:
- Detect peaks: The radar sensor first identifies detection points — frequency bins where signal energy spikes, indicating a likely object.
- Select a patch: Rather than grabbing the whole frame, the system selects a contiguous region of frequency bins surrounding those detection points. The patch size is determined by the detection points themselves — more complex scenes produce larger or more numerous patches.
- Transmit and infer: Only the sampled patch data gets sent to the car's CPU/GPU/accelerator stack, where one or more ML models use it for object classification, identification, and tracking.
The claim explicitly covers an autonomous or semi-autonomous vehicle with CPUs, GPUs, and hardware accelerators (likely a reference to Nvidia's own Drive platform). The "ordered intervals" language in the claim is patent-speak for the frequency bin axes — range-Doppler maps being the most common representation in automotive radar.
What this means for autonomous vehicle perception pipelines
Automotive radar has historically been the poor cousin of lidar and camera in self-driving perception stacks — coarser resolution, harder to interpret. Pushing radar signal processing through ML models rather than traditional signal-processing pipelines is a trend Nvidia and others are actively pursuing. The bottleneck isn't compute anymore; it's getting rich enough data from the sensor to the model in the first place.
This patent addresses that data-pipeline problem directly. If patch-based sampling can preserve the signal quality needed for ML inference while slashing bandwidth requirements, it makes radar a more viable primary sensor — not just a fallback for bad weather. For your future autonomous vehicle, that could mean better object detection at lower system cost.
This is a genuinely useful piece of systems engineering, not a flashy AI headline. The problem it solves — sensor-to-compute bandwidth being a hard constraint in production vehicles — is real and largely invisible to anyone outside the industry. Nvidia is clearly thinking about how to make its Drive platform work within the messy physical constraints of actual cars, and this patent reflects that grounded engineering mindset.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.