Qualcomm Patents GPS-Assisted Motion Estimation for 3D Point Cloud Compression
Compressing 3D LiDAR data is brutally hard — the scene changes every millisecond and every point in space needs to move with it. Qualcomm's new patent shortcuts that problem by leaning on GPS to figure out how the world shifted between frames before even looking at the point cloud itself.
What Qualcomm's GPS-driven point cloud trick actually does
Imagine a self-driving car scanning its surroundings with a LiDAR sensor 10 times per second. Each scan produces millions of floating 3D points — a point cloud — and sending or storing all of them raw would be wildly expensive. So engineers compress them, much like video is compressed, by only encoding what changed between frames.
The hard part is figuring out what changed due to the car moving versus what changed because objects in the scene moved independently. Qualcomm's patent tackles the first problem — the car's own motion — by using GPS data to get a head start on estimating how the whole scene shifted between frames. That global estimate is then refined using the point cloud data itself.
One clever detail: the system specifically looks for ground points (points that are clearly part of the road surface) to anchor a rotation estimate. The ground doesn't move on its own, so it's a reliable reference. The result is a leaner, more accurate compression pipeline that could reduce the bandwidth needed to stream or store high-fidelity 3D sensor data.
How ground points anchor Qualcomm's rotation matrix estimate
The patent describes a two-stage motion estimation pipeline for compressing point cloud data frame-by-frame.
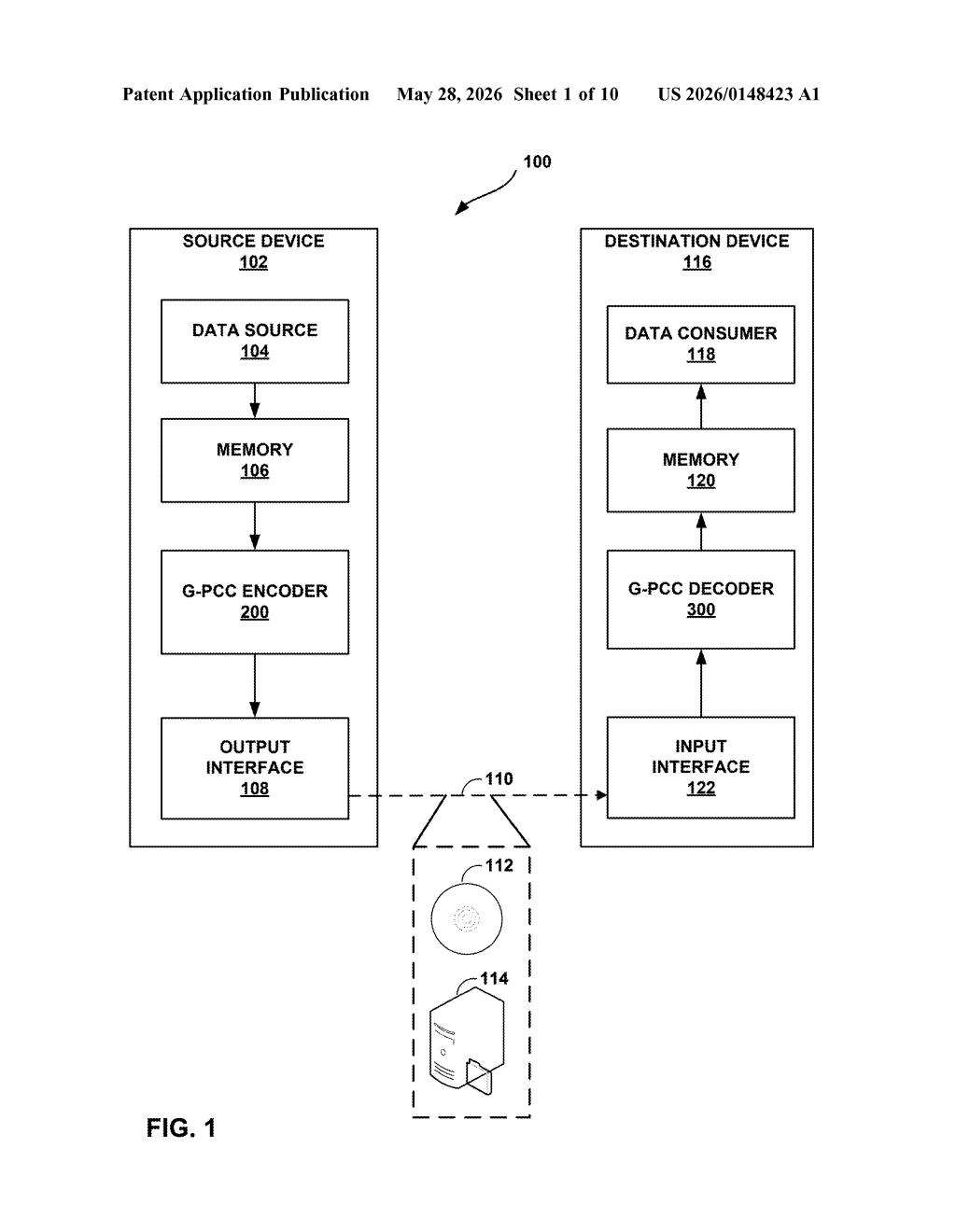
Stage 1 — Global motion estimation: The encoder identifies a first set of global motion parameters derived from GPS information. Think of this as a rough answer to "how much did the vehicle's position and orientation change between frame A and frame B?" That raw GPS estimate is then refined into a second set of parameters that get applied to warp (motion-compensate) the reference frame before any per-point analysis begins.
Stage 2 — Local motion estimation: After the global warp is applied, individual objects that moved independently of the vehicle (pedestrians, other cars) are handled with local motion vectors — per-node offsets that capture residual motion the global model couldn't account for.
On the decoder side (which is what the first independent claim covers), the process works in reverse. The decoder checks whether any given point is a ground point — part of the static road surface. If it is, that point is used to estimate a rotation matrix (a mathematical description of how the sensor's orientation changed), which then drives motion compensation for the whole frame. Ground points are trusted anchors because they don't move independently, making them ideal calibration references for undoing the vehicle's own rotation.
What this means for LiDAR data in autonomous vehicles
Point cloud compression is a core bottleneck in autonomous driving and robotics. LiDAR sensors generate enormous amounts of data, and real-time systems need to either stream that data to a backend or compress it on-device for storage. Every improvement in compression efficiency directly translates to lower bandwidth costs, faster processing, or the ability to run higher-resolution sensors.
Using GPS as a prior — feeding external positioning data into the compression loop before analyzing the point cloud itself — is an efficient shortcut that could meaningfully reduce the computational work required. For Qualcomm, which supplies chips to automotive OEMs through its Snapdragon Ride platform, this kind of patent stakes out IP territory at the intersection of sensor processing and compression standards, an area where codec standardization efforts like G-PCC and V-PCC (the MPEG point cloud compression specs) are still actively evolving.
This is a solid, focused patent with a clear engineering rationale — using GPS as a compression hint is genuinely pragmatic, not just clever on paper. It's unlikely to generate headlines, but for anyone building LiDAR pipelines or watching Qualcomm's automotive stack, it's a meaningful data point about where their codec IP is headed.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.