Nvidia Patents a Self-Correcting Depth Image Pipeline for Stereo ML Systems
Stereo cameras are everywhere in robotics and autonomous vehicles — but their depth estimates can go badly wrong in glossy, reflective, or poorly lit environments. Nvidia's new patent describes an automated system that catches those errors and corrects them before they cause bigger problems downstream.
What Nvidia's depth image error-fixer actually does
Imagine your car's cameras try to judge how far away a shiny wet road sign is. The reflection throws off the depth estimate — suddenly the system thinks a flat surface is a wall, or vice versa. That kind of bad reading, left unchecked, is a real problem for any machine that relies on cameras to understand 3D space.
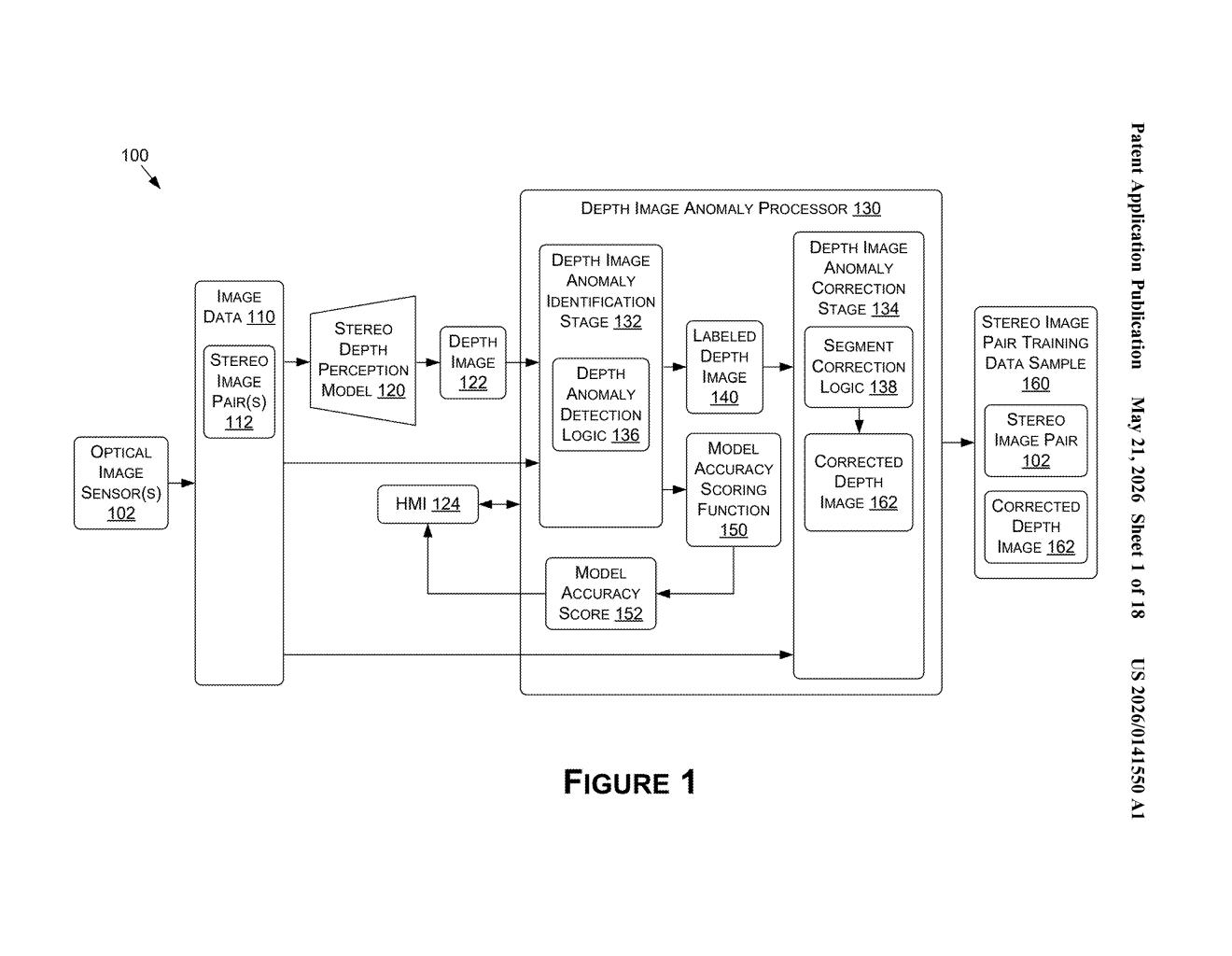
Nvidia's patent describes a system that acts like a quality-control layer sitting on top of a stereo depth camera. After the camera's AI estimates how far away everything is, this system scans the resulting depth image — a map where each pixel stores a distance value — and looks for patches that seem wrong compared to the surroundings.
When it finds a suspicious patch, it classifies what kind of problem it is (a reflection, a glare spot, a structurally weird zone) and then generates a corrected estimate to replace the bad values. The goal is a cleaner, more trustworthy depth map that downstream systems — like path planning or object detection — can actually rely on.
How the anomaly processor classifies and repairs bad pixels
The patent describes a two-stage processor called the Depth Image Anomaly Processor. The first stage is the anomaly identification stage, which evaluates a depth image produced by a stereo ML model and flags segments where depth values look out of place relative to neighboring regions.
The second stage is the correction stage, which takes those flagged segments and applies one or more correction techniques to generate updated depth values. Crucially, correction isn't one-size-fits-all — the system can use different strategies depending on what caused the anomaly:
- Structural characteristics: If the volume of space corresponding to the bad segment has detectable geometry (a wall, a floor plane, an edge), that geometry informs the corrected estimate.
- Local phenomena: If lighting artifacts like reflections, glare, or shadows appear to be the culprit, those characteristics feed into the fix.
The claim is grounded in a standard ML inference loop: a stereo image pair goes in, a depth image comes out, anomalous segments get classified in image space (meaning pixel coordinates, not 3D world coordinates), and an updated depth image is generated. The system is also described as having a training data sampling component, suggesting the anomaly detector itself is a learned model trained on examples of bad depth predictions.
What this means for autonomous systems using stereo cameras
Stereo depth cameras are a core sensor modality for robots, autonomous vehicles, and AR/VR headsets — any device that needs to understand the physical world in 3D. The well-known weakness of stereo depth perception is that it fails in exactly the conditions real environments throw at it: shiny surfaces, bright windows, dark corners. A self-correcting layer that catches and patches those failures before they propagate downstream could meaningfully improve the reliability of any system Nvidia powers with its Jetson or Drive platforms.
For you as a developer or product builder, this is the kind of unglamorous plumbing that determines whether a robotics demo works in a controlled lab or actually ships in the real world. Nvidia filing this patent signals they're thinking seriously about the gap between what stereo ML models promise and what they deliver under real-world conditions.
This is solid, practical engineering — not a moonshot. Nvidia is essentially patenting a QA layer for stereo depth pipelines, which is exactly the kind of robustness work that separates demo-quality perception from production-quality perception. It won't make headlines at a keynote, but it's the kind of infrastructure that makes autonomous systems actually deployable.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.