New Waymo Patent Lets Self-Driving Cars Answer Road Questions
Waymo is patenting a system that lets a neural network field open-ended questions about what a self-driving car is currently sensing — think asking an AI 'is that pedestrian about to cross?' and getting a structured answer in real time.
What Waymo's sensor-query system actually does
Imagine you could tap your shoulder and ask, 'hey, what's happening on the road right now?' That's basically what Waymo is building — except the 'shoulder' is their autonomous vehicle's sensor stack, and the question goes to a neural network instead of a person.
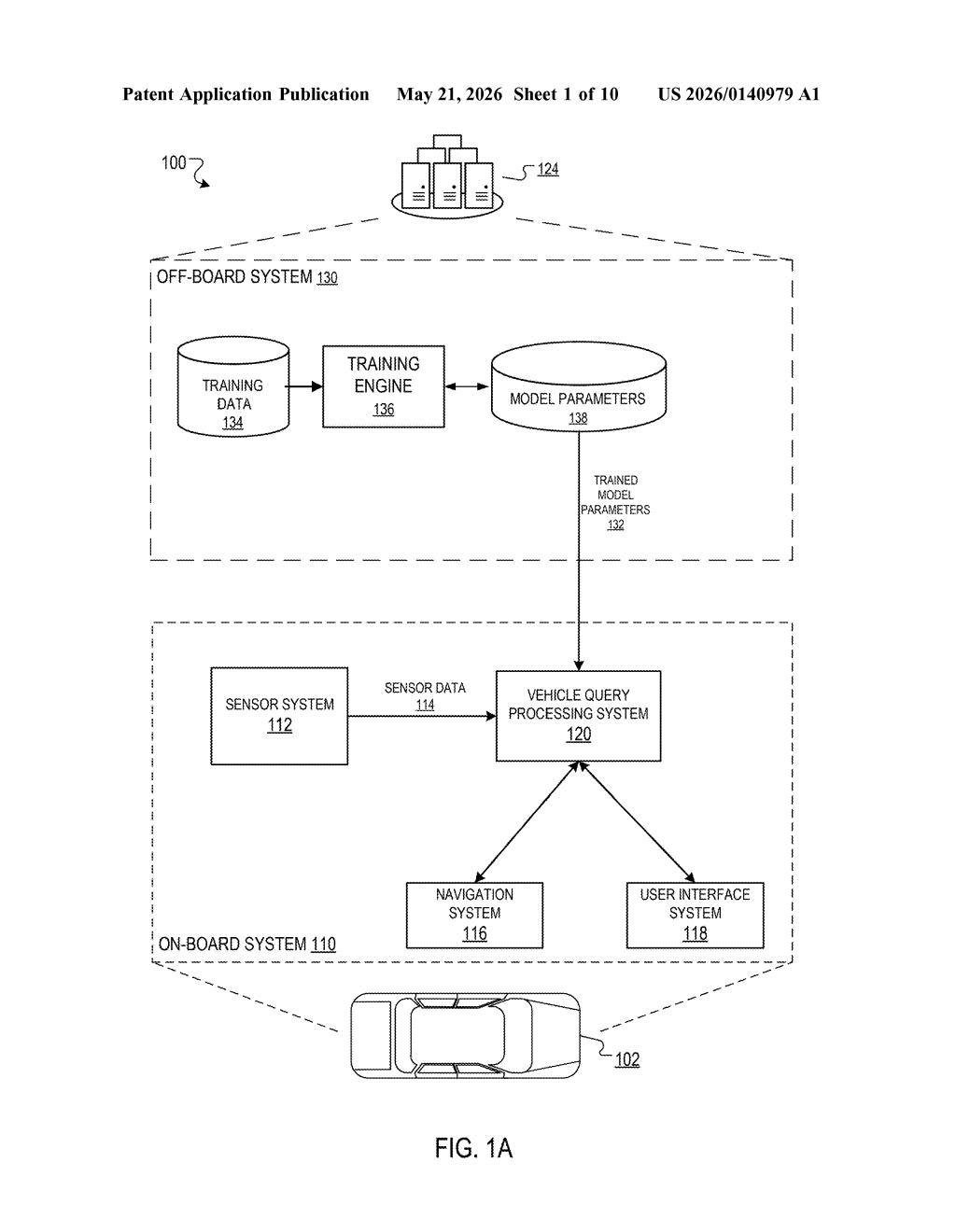
The system takes live sensor data from the car's cameras, lidar, and radar, then accepts a query — a specific question or prediction task about the driving environment. It bundles both the sensor readings and the query into a format a neural network can process, then generates a response. That response could be a predicted action, a description of what's happening, or some other structured output useful for the car's decision-making.
The really interesting part is the framing: instead of building a separate model for every possible prediction task (one for pedestrian detection, one for lane changes, etc.), Waymo is moving toward a single, queryable model that can handle multiple tasks by asking it the right question.
How Waymo tokenizes sensor data for neural querying
The patent describes a Vehicle Query Processing System that connects raw sensor observations to a token-based neural network — the same architectural family as large language models (LLMs), where inputs are broken into discrete tokens that the network processes in sequence.
Here's the flow:
- Sensor data input: The system ingests one or more observations of the driving environment — lidar point clouds, camera images, radar returns, or any combination.
- Query input: A query is received that defines a specific prediction task — for example, 'will the vehicle ahead brake in the next two seconds?' or 'classify the behavior of the cyclist at the intersection.'
- Tokenization: Both the sensor data and the query are encoded into a unified set of input tokens (discrete chunks that the network can read, similar to how an LLM tokenizes words and sentences).
- Neural network processing: A token processing neural network consumes the combined input and produces an output token sequence representing the answer to the query.
The architectural flexibility here is the key detail. By treating prediction tasks as queries rather than hard-coded model outputs, the same network backbone can potentially handle diverse prediction scenarios without being retrained for each one.
What this means for next-gen autonomous vehicle AI
Traditional autonomous vehicle perception pipelines are built from stacks of specialized models — one for object detection, one for trajectory prediction, one for scene classification. Maintaining and updating all of those is expensive, and getting them to share context across tasks is a known hard problem. A unified queryable model could, in principle, reduce that complexity significantly by centralizing perception reasoning into a single flexible system.
For Waymo specifically, this fits a broader industry shift toward foundation-model-style architectures for robotics and autonomous driving. If you can ask a vehicle's AI an arbitrary question about its environment and get a reliable answer, that opens the door to more adaptable and explainable autonomous systems — something regulators and safety engineers have been asking for.
This is a meaningful architectural bet, not incremental paperwork. Bringing LLM-style query-response design into real-time sensor processing is exactly the kind of unification that the autonomous driving field has been theorizing about — and Waymo filing on it suggests they're past the whiteboard stage. The inventor list includes Dragomir Anguelov, Waymo's VP of Perception and a heavyweight in the ML-for-AV research world, which adds credibility that this is serious internal infrastructure work.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.