Waymo's New Patent Teaches One AI to Plan Its Own Route and Read Every Other Driver at Once
Most self-driving systems treat 'where should I go?' and 'where is everyone else going?' as two separate problems. Waymo's new patent collapses them into one — a single AI model that answers both questions at the same time.
How Waymo's shared prediction model handles two jobs at once
Imagine you're driving and your brain has to do two things simultaneously: decide your own next move and predict what the car next to you is about to do. Right now, most self-driving systems handle those as separate steps — one software module figures out the car's own route, another watches everyone else. That creates a slight but real gap between the two processes.
Waymo's patent describes feeding all of that — where the robotaxi wants to go, what's happening around it — into a single neural network at the same time. The output is a bundle: a set of possible paths for the robotaxi itself, plus predictions of where every nearby pedestrian, cyclist, and driver might go next.
The idea is that sharing one model for both tasks could let each inform the other more naturally. If the system knows the robotaxi is likely to turn left, it might also better anticipate how a cyclist nearby will react — rather than treating the two as completely separate puzzles.
Inside the single neural network doing both planning jobs
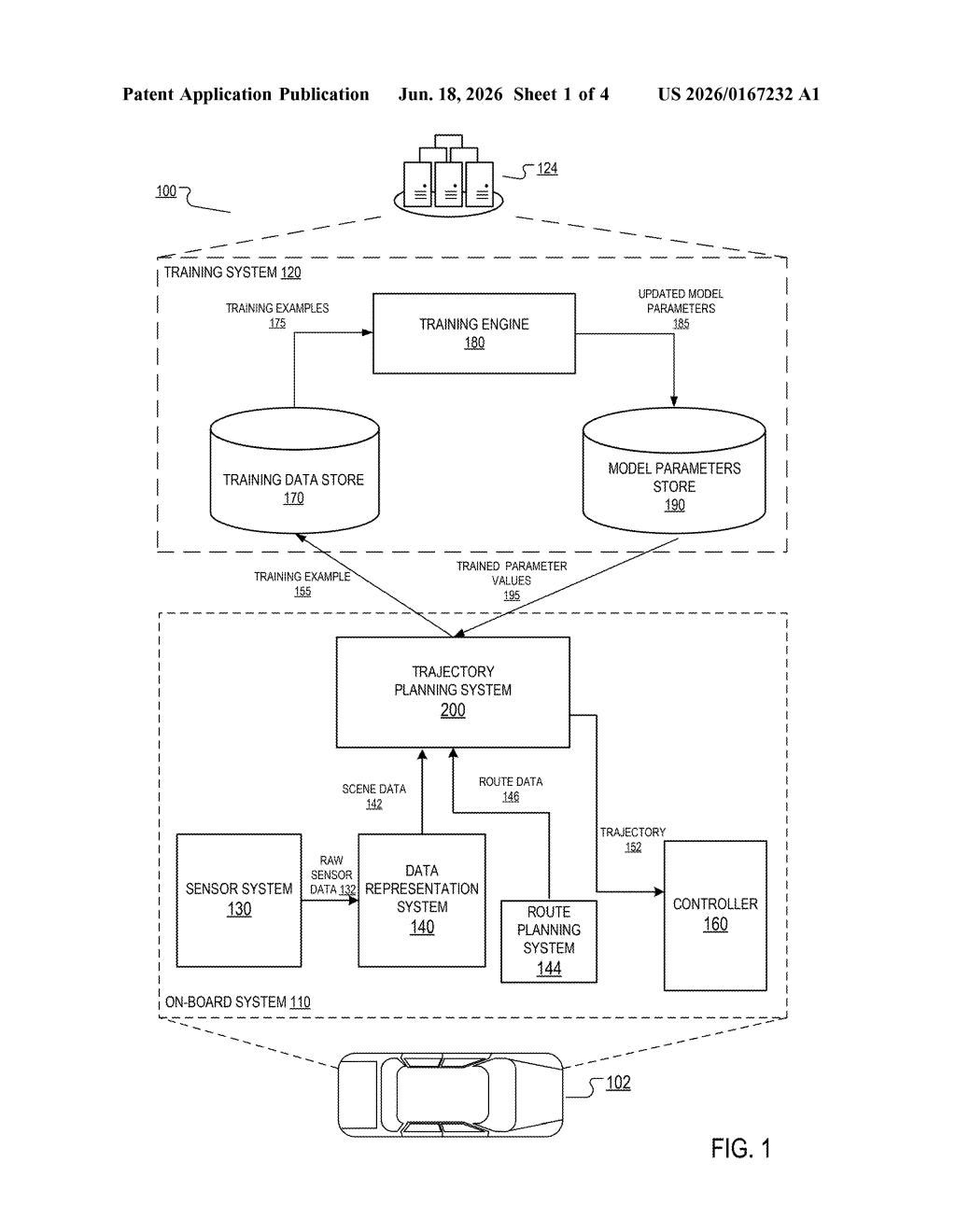
The patent describes a method where the autonomous vehicle collects two types of input at any given moment:
- Scene data — a snapshot of the environment: where other cars, pedestrians, and cyclists are, and what they've been doing.
- Route data — the intended path the robotaxi is supposed to follow through that environment.
Both inputs are fed together into a single prediction neural network (a type of AI trained to find patterns across many examples). The network produces a combined output that has two parts: (1) a set of candidate planned trajectories — possible paths the robotaxi itself could take — and (2) for each nearby person or vehicle, a set of predicted future trajectories — where that agent is likely to go.
The key architectural choice is the word shared. Rather than running one model to plan the robotaxi's path and a separate model to predict others, both outputs come from the same learned representations (the internal patterns the neural network builds up). That means information about the robotaxi's intentions and information about surrounding agents can influence each other inside the same computation.
The patent doesn't specify the exact neural network architecture, but the claim structure suggests the approach is general enough to apply to any scene with multiple moving agents.
What a unified planning model means for robotaxi safety
Self-driving planning has long separated prediction from planning for engineering convenience — it's easier to build and debug two specialized systems than one that does both. But that separation means the planner has to accept the predictor's outputs as a finished product, even if the robotaxi's own planned move would change what nearby drivers are likely to do. A unified model could, in principle, close that feedback loop.
For riders and safety regulators, the practical implication is a system that might handle complex, interactive scenarios — a four-way stop, a pedestrian stepping off a curb — with fewer blind spots between its planning and prediction steps. Waymo is already operating commercially in several U.S. cities, so improvements to this core decision-making layer could affect vehicles already on the road.
This is one of the more intellectually interesting autonomous-driving patents in a while. Collapsing prediction and planning into a shared model is a real architectural bet, not just an incremental tweak. Whether it actually delivers better real-world decisions is an empirical question — but the intuition behind it is sound, and it aligns with where research in the field has been heading.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.