Tesla's New Patent Teaches Its Cars to Read Where Every Lane Leads
Tesla is patenting a way for its cars to figure out — using cameras alone — which lanes lead where, which merge, and which dead-end. It's the kind of spatial awareness that usually trips up even seasoned autonomous driving systems.
What Tesla's lane-mapping camera AI actually does
Imagine you're driving toward a highway split where one lane becomes two, or where a turning lane quietly forks off from the through lane. A human driver reads these situations almost instantly. A self-driving car, though, has to be explicitly taught what lanes connect to what — and that's harder than it sounds.
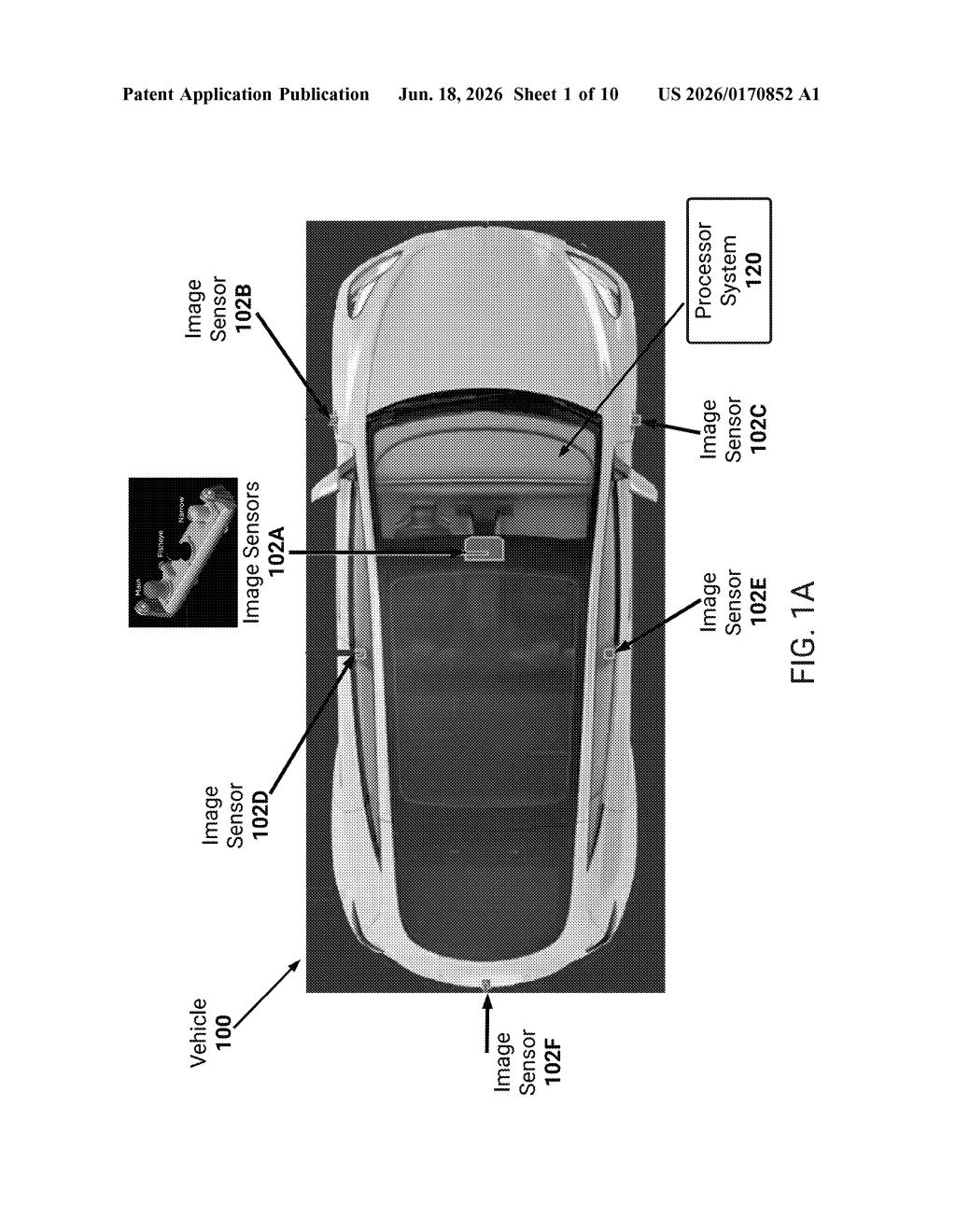
Tesla's new patent describes a system that uses cameras mounted around the car to continuously build a picture of lane connectivity: which lane you're in, where it goes next, and how it relates to every lane around you. The cameras feed into an AI model that stitches all those separate views together into one shared understanding of the road.
The system also tracks that information over time, so the car doesn't have to re-figure out the lane layout from scratch at every moment. Instead, it carries forward what it already knows and updates as new details come in — much like you'd mentally track the shape of an interchange as you approach it.
How Tesla's model fuses camera feeds into a lane map
The patent describes a multi-step AI pipeline built around a vehicle's camera array:
- Sensor ingestion: Multiple cameras placed around the car capture images simultaneously, giving the system a full 360-degree view of the surrounding road.
- Backbone networks: Each camera feed is processed by its own neural network (a "backbone") that extracts visual features — edges, lane markings, signs, pavement texture — from that single viewpoint.
- Transformer fusion: The outputs from all those individual backbone networks are fed into a transformer network (the same type of architecture behind large language models — here used to find relationships between different camera views rather than between words) which merges them into one unified road representation.
- Temporal and spatial aggregation: That merged representation is then combined with information from earlier moments in time, so the model builds a consistent, evolving picture of the lane layout as the car moves.
The final output is lane connectivity information — essentially a map of which lanes are adjacent, which merge ahead, and how the lane the car occupies relates to every other lane in view. This gives the vehicle the structured knowledge it needs to plan lane changes, merges, and turns without relying on pre-loaded HD maps.
What this means for Tesla's camera-only self-driving bet
Tesla has publicly staked its self-driving approach on cameras rather than lidar (the laser-based sensors most autonomous vehicle companies use). That bet only pays off if vision-based AI can solve hard problems like lane geometry reliably. Lane connectivity is one of those hard problems — it's not enough to detect a line on the road; the car needs to understand the structure of the road network in real time.
If this system works as described, it could make Tesla's Full Self-Driving software more reliable in complex road situations — highway interchanges, construction zones, and unmarked lane splits — without requiring the expensive sensor arrays competitors lean on. For you as a driver, that would mean fewer moments where the car hesitates or makes an unexpected move because it lost track of where your lane was heading.
This is a real technical problem that bites autonomous vehicles constantly, and Tesla's camera-only constraint makes solving it harder than it is for lidar-equipped rivals. The transformer-fusion approach is well-established in the research world, so the novelty here is in the specific implementation for real-time, multi-camera lane reasoning — not in any single algorithmic breakthrough. Worth watching if you track Tesla's FSD development, but this is engineering progress, not a direction change.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.