Amazon's New Patent Wants to Bolt Sensors onto Regular Cars to Train Its Self-Driving AI
Zoox wants to train its self-driving AI without putting its own autonomous vehicles on every road first — and the trick is bolting a precisely arranged sensor rig onto a regular, human-driven car.
How Zoox teaches its robotaxi using everyday vehicles
Imagine you're learning to cook a new recipe, but the kitchen you'll eventually use isn't built yet. So you practice in a regular kitchen, with the pots and pans arranged exactly where they'll be in the new one. That's essentially what Zoox is doing here.
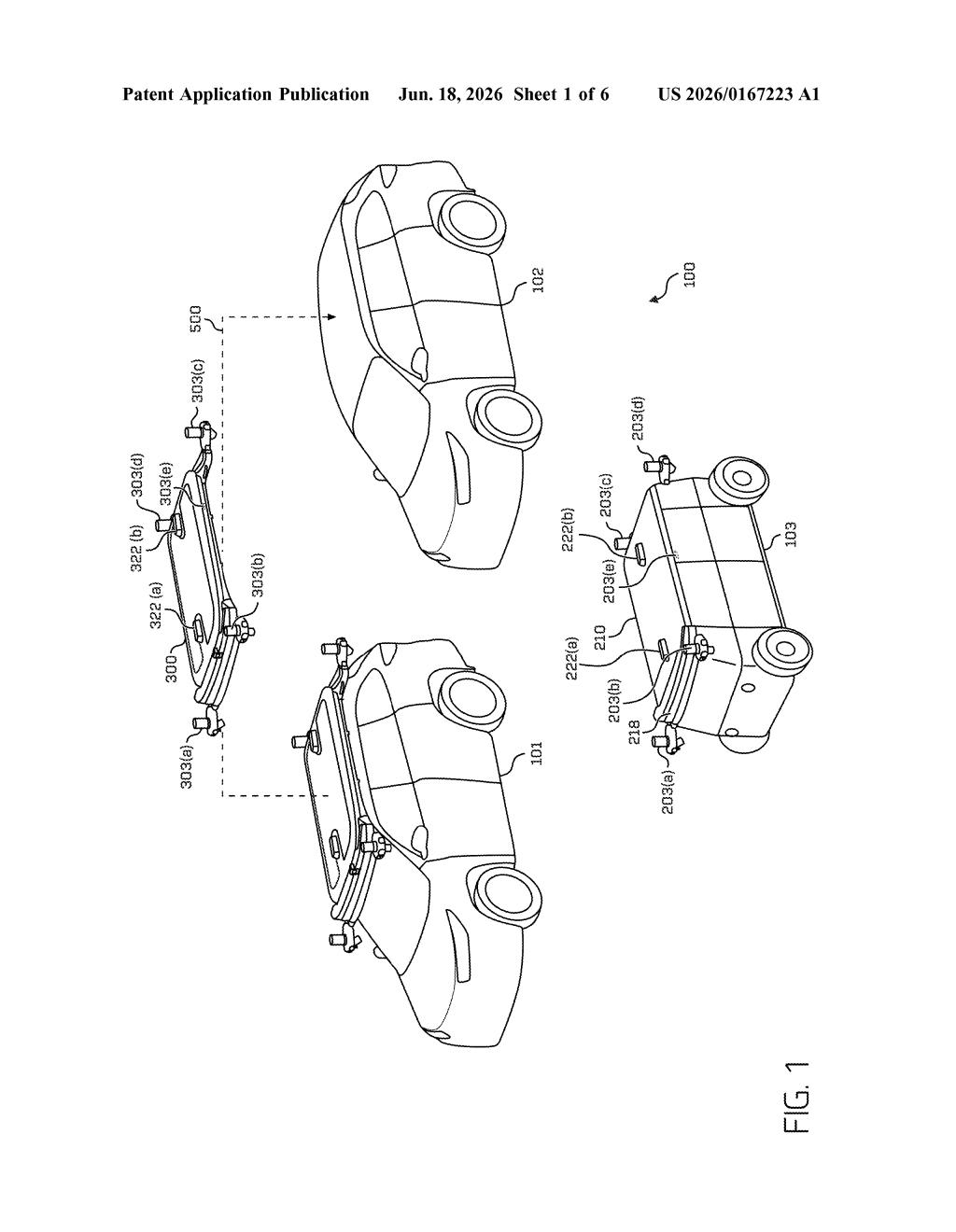
The company has patented a sensor platform — think of it as a specialized roof rack packed with cameras, lidar (laser-based distance sensors), and other equipment — that can be bolted onto an ordinary car. A human driver takes that car out on the road, and the sensors record everything: other vehicles, pedestrians, intersections, weather. All of that data then gets fed into an AI model that will eventually drive Zoox's purpose-built robotaxi.
The clever part is that the sensors on the rig are mounted at the exact same heights and positions as they will be on the finished robotaxi. That way, the AI learns to see the world from the same vantage point it will actually have — no awkward translation required when it moves to the real vehicle.
How the sensor rig mirrors the robotaxi's exact sensor layout
The patent describes a method with three main steps:
- Mount a sensor platform on a conventional vehicle. The rig includes at least one lidar sensor (a device that fires laser pulses to map the 3D geometry of the surroundings) placed at a specific height above the road surface.
- Drive normally and collect data. The host vehicle operates in non-autonomous mode — a human is at the wheel — while the sensors record the environment continuously.
- Train a machine-learned model on that data, then deploy the model onto Zoox's purpose-built autonomous vehicle to actually control it.
The key technical constraint is geometric matching: the lidar sensor on the bolt-on rig must sit at the same vertical position as the lidar sensor built into the finished robotaxi. This matters because sensor height changes what the AI sees. A sensor mounted two meters up perceives the tops of cars and the gaps between pedestrians differently than one mounted at 1.5 meters. If the training data comes from a mismatched height, the deployed AI has to compensate — introducing error.
By enforcing positional correspondence during data collection, Zoox ensures the model trains on data that is geometrically faithful to what the robotaxi's own sensors will deliver on day one.
What this means for how self-driving AI gets trained at scale
For Zoox — an Amazon-owned autonomous vehicle company still scaling up its robotaxi fleet — this approach offers a way to accumulate large volumes of real-world sensor data before the robotaxi itself is deployed in a given city. Instead of waiting until the purpose-built vehicle is road-legal everywhere, the company can send out sensor-equipped regular cars to map and learn new environments. That dramatically reduces the cold-start problem that plagues any new robotaxi rollout.
For riders and regulators, the implication is that a Zoox vehicle arriving in a new city may already have been "trained" on that city's streets by human-driven scout vehicles — potentially making early deployments safer and more confident than if the AI were encountering that environment for the first time.
This is a genuinely practical piece of engineering thinking from Zoox. The geometric-matching requirement — making sure the training rig mirrors the robotaxi's sensor positions exactly — is the kind of detail that separates useful data collection from data that creates subtle AI errors down the line. It's not flashy, but it's the sort of foundational infrastructure patent that quietly determines whether a self-driving program succeeds or fails at scale.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.