Waymo Patents a Self-Driving Car That Notices When Its Own Sensors Are Off
What if your self-driving car could notice its own sensors were off — and fix them — just by comparing what it sees to what the map says should be there? That's exactly what Waymo is patenting.
How Waymo's robo-taxi checks its own sensor accuracy
Imagine a security camera that slowly tilts a few degrees over months without anyone noticing. For a human, that's a nuisance. For a self-driving car, a sensor that's even slightly misaligned can mean the difference between a smooth ride and a dangerous misjudgment.
Waymo's patent describes a system that lets an autonomous vehicle check its own sensor accuracy in real time by comparing what its sensors detect — the position of stop signs, lane markers, curbs, buildings — against where those same objects are recorded in its road map. If the sensor says a fire hydrant is two feet to the left of where the map knows it to be, something is off, and the system can automatically adjust.
Rather than requiring a technician to manually recalibrate sensors in a garage, Waymo's approach lets the car continuously self-correct as it drives. The system can tweak a sensor's position, height, tilt, direction, or scale — essentially nudging it back into alignment using the map as a trusted reference.
How the map-comparison loop adjusts sensor parameters
The patent describes a feedback loop built around a comparison engine. Here's the flow:
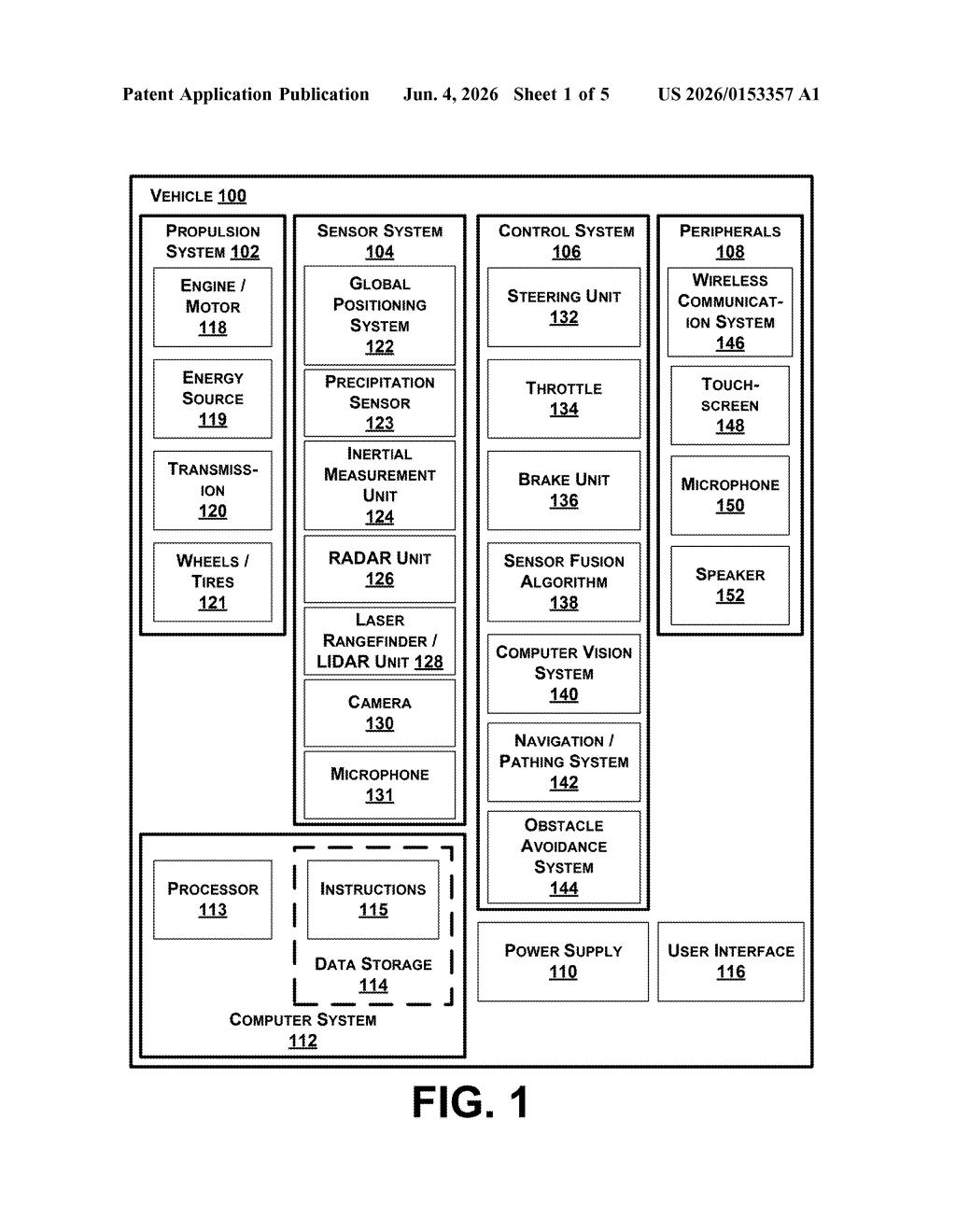
- The vehicle's sensor suite (cameras, lidar, radar) generates data about nearby objects and estimates their physical locations in the world.
- That estimated location is then compared against a pre-existing, high-definition road map that already knows the true location of those same objects (traffic signs, curbs, lane lines, buildings, etc.).
- If there's a meaningful gap between where the sensor says something is and where the map says it should be, the system flags a calibration error.
- The system then adjusts one or more sensor parameters — including position, height, orientation (which direction it's pointing), direction-of-focus, or scaling — to bring the sensor back into alignment with ground truth.
The phrase "direction-of-focus" is important: this isn't just about physical mounting angle. The patent covers correcting how a sensor is interpreting what it sees, not only where it's physically aimed.
Map data here acts like a calibration target — similar to how a photographer calibrates a lens against a known test chart. The road map, built from prior high-precision surveys, serves as the reference reality. Sensors that drift from it get nudged back automatically.
What self-calibrating sensors mean for autonomous fleet ops
For a company like Waymo operating a commercial robotaxi fleet, manual sensor recalibration at scale is a real operational bottleneck. Sensors drift over time due to vibration, temperature changes, and minor physical shifts. Catching that drift early — and correcting it without pulling the car out of service — could meaningfully improve both safety margins and fleet uptime.
For riders, this is invisible infrastructure. But a fleet that self-corrects sensor drift is a fleet that requires fewer service interruptions and maintains tighter safety tolerances over thousands of miles. The less a robotaxi needs human intervention to stay accurate, the closer Waymo gets to truly scalable autonomous operations.
This is unglamorous but genuinely important plumbing for autonomous vehicle operations. The interesting bet here is using the map as a live calibration reference rather than a static one-time setup — it turns every mile driven into a continuous accuracy check. Whether Waymo already does something like this operationally and is now formalizing IP, or this represents a new capability, the direction is clearly toward reducing human maintenance touchpoints in the fleet.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.