IBM Patents a Drone-Based System That Extends a Car's Vision in Fog or Snow
Fog and heavy snow are genuinely hard problems for self-driving cars — the sensors that work great in sunshine can go nearly blind in a blizzard. IBM's answer: send a drone ahead to see what the car can't.
What IBM's drone visibility extender actually does
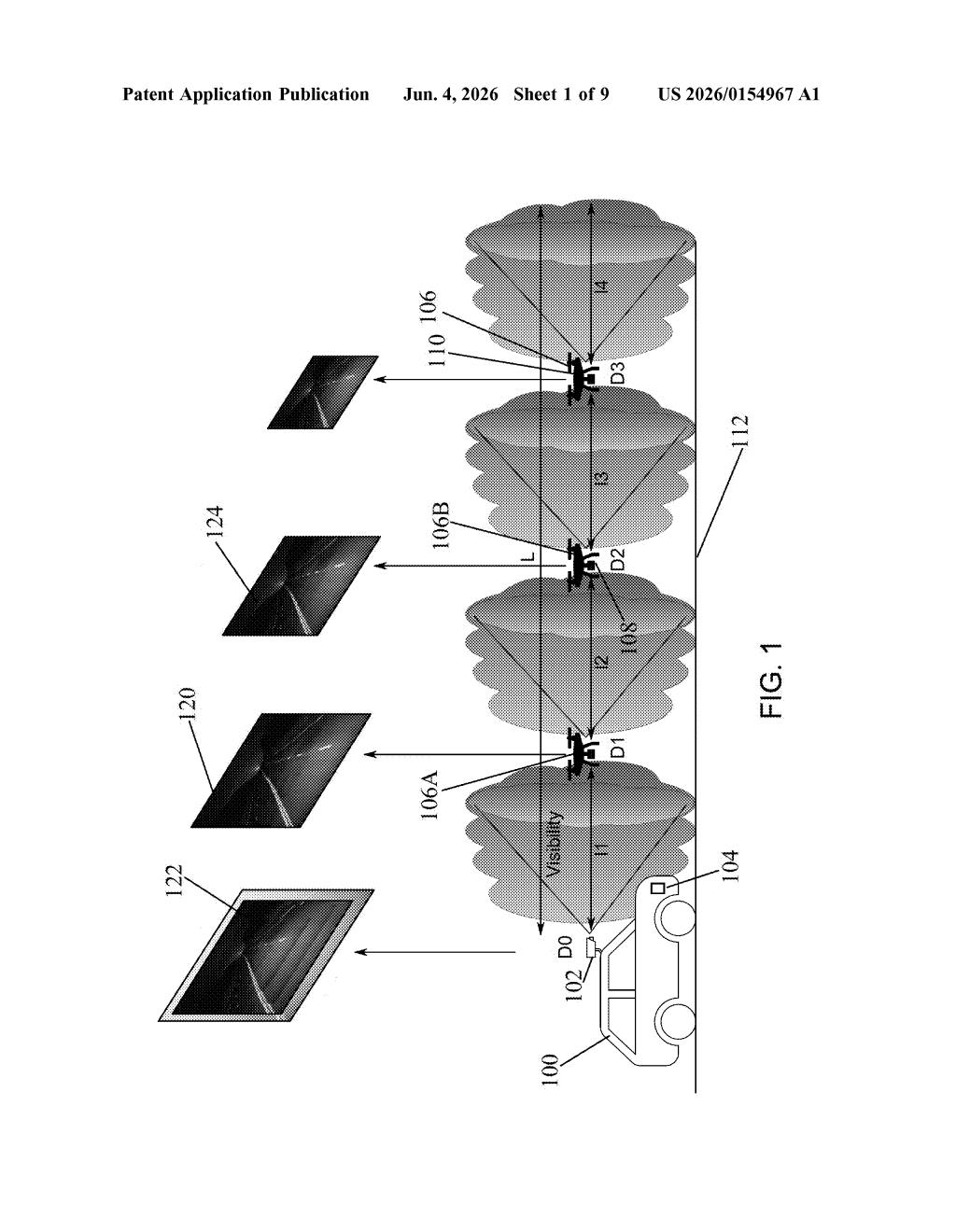
Imagine you're driving through thick fog and your headlights only reach about 30 feet in front of you. Everything beyond that is a guess. IBM's patent describes a system that automatically launches a drone the moment your vehicle's camera detects that kind of limited visibility.
The drone flies out to exactly the edge of what your car's camera can already see, then points its own camera forward. Its footage gets combined with your vehicle's camera feed in real time, effectively doubling — or further extending — how far ahead the system can "see." If even the drone's view isn't enough, the patent describes chaining multiple drones in sequence, each one sitting at the edge of the previous drone's visibility range.
The result is a kind of aerial relay team that keeps pushing your effective sight line further down the road, giving the vehicle's navigation system — or the driver — a much longer preview of what's coming, whether that's a stopped car, a sharp curve, or a patch of black ice.
How the vehicle and drone feeds get stitched together
The system works in a continuous feedback loop anchored to a key measurement: vehicle visibility distance (how far the car's own camera can usefully see at any given moment). A computing device onboard the vehicle constantly evaluates incoming camera frames to calculate that distance.
When that measured distance drops below a predetermined desired visibility threshold — say, the minimum safe distance needed to brake in time — the system deploys a first drone. Critically, it positions the drone at exactly the vehicle visibility distance ahead, so there's no gap in coverage. The drone then captures its own forward video, and the two feeds are merged into a combined image whose total useful range equals the vehicle's visibility distance plus the drone's own visibility distance.
The patent also covers a cascading multi-drone configuration:
- A second drone can be deployed at the edge of the first drone's visibility range
- Each drone's feed gets folded into the combined image, extending the chain further
- The system can also issue alerts to other vehicles nearby, using the drone network as a distributed early-warning mesh
The image stitching and drone positioning rely on onboard computing, meaning the core logic doesn't depend on cloud connectivity — relevant when you're in a remote blizzard with spotty cell service.
What this means for autonomous driving in bad weather
For autonomous vehicles, poor weather isn't a minor inconvenience — it's one of the hardest unsolved problems in the space. Lidar scatters in heavy rain, cameras wash out in snow, and radar alone lacks the resolution to catch everything. A drone relay system sidesteps the sensor physics problem entirely by physically moving an eye to a better vantage point.
For drivers right now, the more near-term angle is the alert system component, which could warn you about hazards before your own headlights reach them. IBM has a long history of filing ambitious vehicle and IoT patents that eventually surface in enterprise or fleet management contexts, so the likeliest early deployment here is probably a commercial trucking or logistics fleet rather than a consumer car — but the core idea applies anywhere visibility is a life-safety issue.
This is a genuinely clever workaround for a real, hard problem — instead of trying to make sensors see through fog, IBM's approach physically relocates a sensor to where the fog isn't as bad yet. The multi-drone chaining idea is the most interesting part and the most operationally complex; making that work reliably in a real storm, with wind and latency and battery constraints, is a serious engineering challenge the patent understandably doesn't solve. Worth watching, but it's a long road from a solid concept to a drone launching itself off your car hood in a Minnesota snowstorm.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.