Nvidia Patents a System That Teaches Robots to Learn From Every Failure
Every time a robot gets stuck and a human has to step in, that intervention is usually lost data — a missed learning moment. Nvidia's new patent tries to capture every one of those moments and turn them into fuel for automatic retraining.
How Nvidia turns robot failures into training data
Imagine a warehouse robot that suddenly freezes in front of an oddly-stacked pallet. A human operator steps in, fixes the problem, and life goes on — but the robot learned nothing. That kind of lost feedback is one of the biggest headaches in deploying autonomous systems at scale.
Nvidia's patent describes a system that watches for exactly these moments. When a robot's sensors signal that something has gone wrong — or that a human had to take over — the system automatically logs what happened, writes a plain-language description of the event, and sorts it into a category of failure mode. No manual incident reports required.
The really interesting part: that captured event can be fed directly back into retraining. So the next time a robot in the fleet encounters a similar situation, it has a better chance of handling it on its own. Think of it as a black-box flight recorder, except instead of just recording crashes, it actively helps prevent the next one.
How the intervention interpreter captures and classifies failures
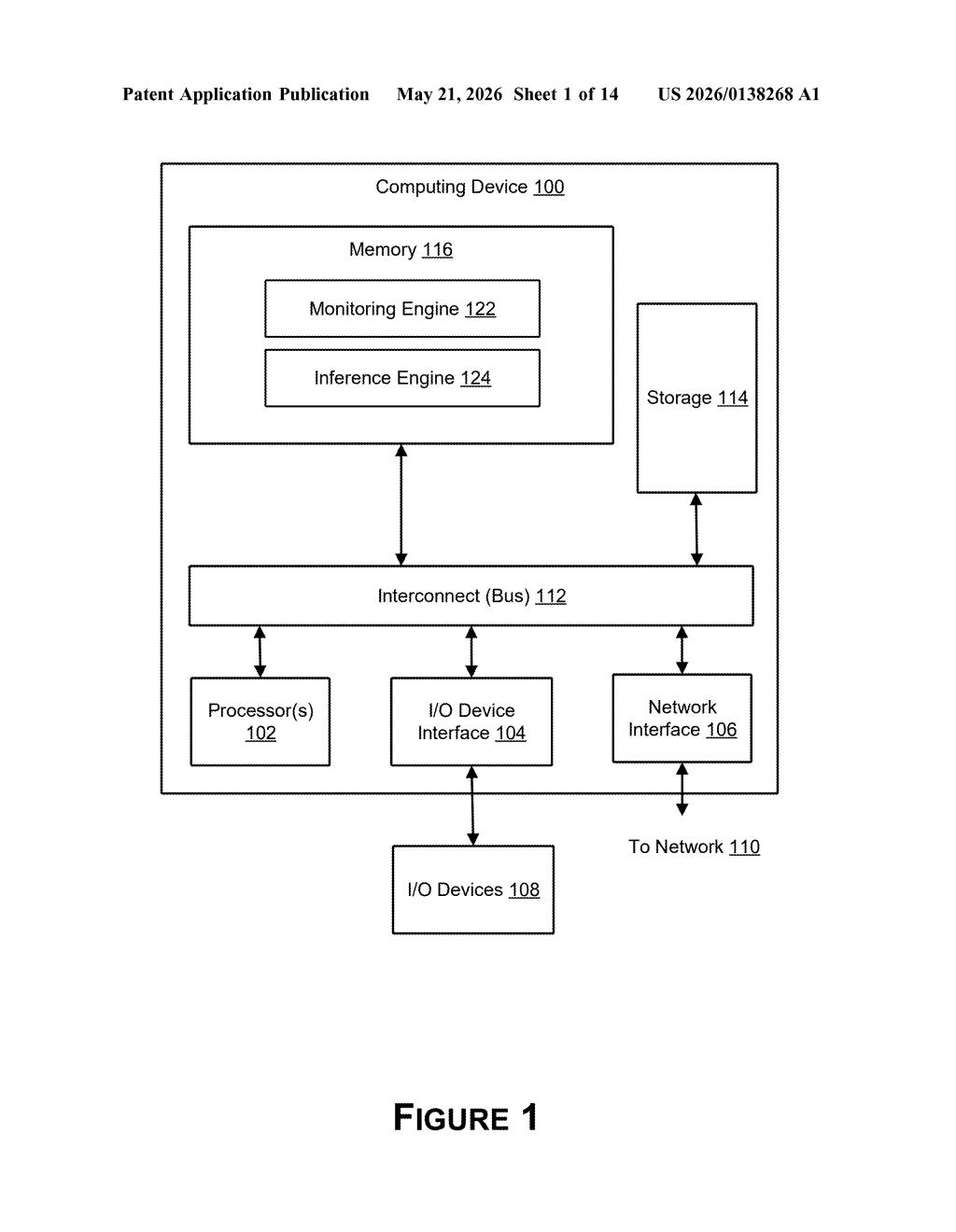
The system works by monitoring a stream of sensor data from one or more robots in a fleet. When a machine learning model determines that the robot's current situation requires an intervention — meaning it can't proceed autonomously — the system kicks into documentation mode.
It collects two sets of sensor readings: pre-intervention values (what the robot observed just before things went wrong) and post-intervention values (what the sensors captured during and after the human stepped in). Together, these form an intervention event that gets written to a structured database.
From there, the system can do several things with that event record:
- Generate a natural language description of what happened (using an inference engine — essentially an LLM or similar model that translates raw sensor data into readable text)
- Classify the event into failure mode categories so engineers can spot patterns across a whole fleet
- Synthesize new training data entries from the event to fill gaps in the robot's existing dataset
- Trigger automated retraining of the robot's control routines without a human having to manually curate the data pipeline
The patent also covers generating alerts for human operators when an intervention is detected — so the system bridges real-time response and longer-term learning in one architecture.
What this means for scaling autonomous robot fleets
For anyone deploying robots at scale — in warehouses, factories, or fulfillment centers — the bottleneck isn't usually the robot hardware, it's the feedback loop. Right now, human interventions are expensive to log consistently and even more expensive to turn into usable training data. This patent describes infrastructure that could make that loop nearly automatic.
From a strategic standpoint, this fits squarely into Nvidia's Isaac robotics platform ambitions. The company wants to be the compute and software backbone for the coming wave of industrial automation — and a system that continuously improves robot behavior from real-world failures is exactly the kind of sticky, platform-level capability that keeps customers on Nvidia's stack.
This is genuinely useful infrastructure work, not a flashy demo. The hard part of scaling autonomous robots isn't the AI at launch — it's the continuous improvement loop afterward, and this patent addresses that directly. Nvidia is building the plumbing that makes robot fleets get better over time without an army of human data labelers.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.